

Метод переміщень. Ідея методу. Основні невідомі. Основна система методу переміщень. Канонічні рівняння та їх зміст. Наведіть приклад.
7.4 Алгоритм расчета систем методом перемещений
Расчет статически неопределимых систем методом перемещений выполняется в следующей последовательности:
1. Находим степень кинематической неопределимости заданной системы.
2. Выбираем основную систему.
3. Записываем канонические уравнения метода перемещений.
4. Строим единичные и грузовые эпюры изгибающих моментов для основной системы.
5. Определяем коэффициенты и свободные члены системы канонических уравнений.
6. Проверяем правильность вычисления коэффициентов и свободных членов системы канонических уравнений.
7. Вычисляем значения неизвестных метода перемещений.
8. Строим эпюры N, Q, M для заданной системы.
9. Проверяем правильность построения окончательных эпюр.
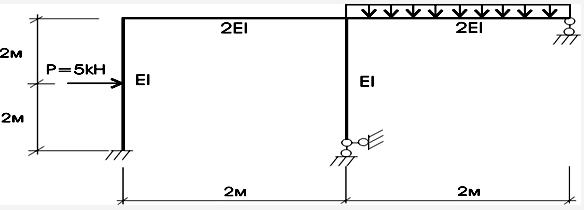
Рисунок 2.3.1 – Розрахункова схема рами
Для розрахунку рами методом переміщень необхідно визначити число невідомих кутових і лінійних переміщень (linearmoving). З цією метою підраховується число жорстких вузлів рами. Жорстким вважається вузол, в якому сходяться жорстко закріплені кінці стержнів. Число жорстких вузлів для наведеної рами nж = 2 (рис. 2.3.2).
У всі жорсткі вузли рами, включаючи опорні, вводять шарніри. Далі досліджується ступінь геометричної змінності такої модифікованої рами.

Рисунок 2.3.2 – Послідовність визначення кінематичної невизначеності при розрахунку методом переміщень: а - визначення числа жорстких вузлів; б - підрахунок числа лінійних переміщень рами
Задана рама після встановлення в неї шарнірів отримує можливість вільного переміщення по горизонталі, отже, ступінь її геометричної змінності (degreeofgeometricalconvertibility) nл = I.
Ступінь кінематичної невизначеності за методом переміщень
|
n = nж + nл = 2+1 = 3. |
(2.3.1) |
Для вибору основної системи методу переміщень в жорсткі вузли рами і за можливими напрямками лінійних зсувів вводимо додаткові зв'язки, що перешкоджатимуть кутовим і лінійним переміщенням.
Після накладання додаткових зв’язків рама перетворюється на сукупність стержнів, жорстко закріплених двома або одним кінцем. За невідомі, в основній системі методу переміщень, беремо невідомі кутові і лінійні переміщення, які виникли в додатково накладених зв'язках після прикладення навантаження.
До остаточного визначення вважаємо їх рівними одиниці.
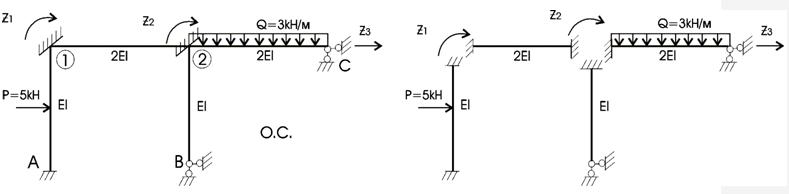
Рисунок 2.3.3 – Вибір основної системи: а - основна система методу переміщень; б - сукупність стержнів, жорстко затиснених двома або одним кінцем
Заздалегідь напрям повороту приймаємо за рухом годинникової стрілки, можливе лінійне переміщення приймаємо зміщення зліва направо. Дійсні напрями кутових і лінійних переміщень уточнюються розрахунком.
2.
Основну систему методу переміщень (рис.
2.3.3) завантажуємо по черзі кутовими і
лінійними одиничними зміщеннями, а
також зовнішнім навантаженням. За
таблицями реактивних зусиль зігнутих
стержнів будуються епюри моментів ![]() в
основній системі від одиничних вимушених
переміщень і силового навантаження
(рис. 2.3.4 ).
в
основній системі від одиничних вимушених
переміщень і силового навантаження
(рис. 2.3.4 ).
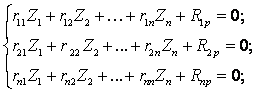
3. Система канонічних рівнянь методу переміщень, яка виражає умову рівності нулю реакцій в додаткових зв'язках, має такий вигляд:
|
|
(2.3.2) |
де ![]() –
реактивне зусилля в i–му
додатковому зв'язку, викликане одиничним
вимушеним переміщенням j–го
зв'язку;
i=1,
2, 3…n; j=1,
2, 3…n. Zi –
реактивне зусилля і–го
зв'язку;
–
реактивне зусилля в i–му
додатковому зв'язку, викликане одиничним
вимушеним переміщенням j–го
зв'язку;
i=1,
2, 3…n; j=1,
2, 3…n. Zi –
реактивне зусилля і–го
зв'язку;
Rip – вантажний член, реактивне зусилля в i–му зв'язку, викликане навантаженням.
В
матричній формі система канонічних
рівнянь: ![]()
|
|
(2.3.3) |
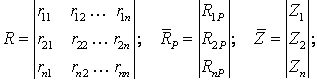
де R – матриця, складається з коефіцієнтів канонічних рівнянь;
![]() –
вектор,
включає вантажні складові;
–
вектор,
включає вантажні складові;
![]() –
вектор
шуканих переміщень.
–
вектор
шуканих переміщень.
Стосовно даного прикладу система канонічних рівнянь

де r11 , r12, r13, R1р – реактивні моменти, які виникають в першому додатково накладеному зв'язку від одиничних зсувів і навантаження. Визначаються при розгляді рівноваги відповідного вузла (рис. 2.3.5) ∑М1=0; r21 , r22, r23, R2р - реактивні моменти в додатково введеному жорсткому затисненні вузла 2 від одиничних зсувів і навантаження. Визначаються при розгляді рівноваги відповідного вузла (рис. 2.3.5) ∑М2=0; r31, r32, r33, R3р - реактивні сили, які виникають в третьому додатково введеному зв'язку - в опорному горизонтальному стержні. Визначаються при розгляді рівноваги всіх сил на вісь додатково введеного стержня (рис. 2.3.5) ∑Х = 0.
Реактивне зусилля в додатковому зв'язку вважається додатним, якщо напрям його дії збігається з вибраним напрямом повороту або лінійним зміщенням вузла.
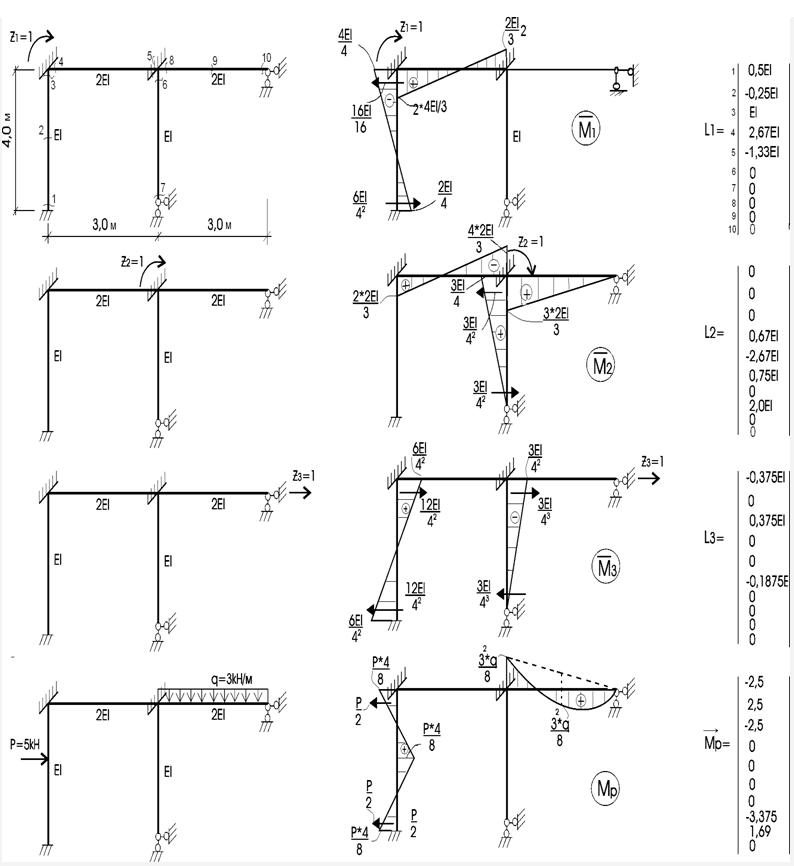
Рисунок 2.3.4 – Одиничні і вантажні епюри моментів в основній системі методу переміщень. Матриці впливу одиничних переміщень по характерних перетинах