

Численное значение нормальной составляющей
anED = 42DE = 3,0720,35 = 3,29 м/c2.
Из полюса плана проводим линию, параллельную направляющей ползуна. Параллельно звену ED откладываем отрезок {dn4} = anED / а = 3,29/0,4 = 8 мм, к концу которого проводим перпендикуляр. Пересечение этого перпендикуляра с указанной выше линией дает точку (е). Отрезок {Пе} соответствует ускорению точки Е, а отрезок {n4e} - тангенциальной составляющей относительного ускорения.
Численное значение тангенциальной составляющей
aED ={n4e}а = 800,4 = 32,0 м/c2.
На отрезке {de} по принципу подобия наносим точку s4, соответствующую центру масс звена 4. Отрезок {Пs4} соответствует ускорению центра масс звена 4.
Численные значения ускорений центров масс звеньев:
aS2 = {Пs2}а = 860,4 = 34,4 м/c2;
aS4 = {Пs4}а = 720,4 = 28,8 м/c2;
aS5 = aE = {Пе}а = 710,4 = 28,4 м/c2.
Угловые ускорения звеньев механизма:
2 = aBA/AB = 4,0/0,39 = 10,4 рад/c2;(-)
3 = 2;
4 = aED/DE = 32,0/0,35 = 91,3 рад/c2.(-)
Знаки (+/-) соответствуют направлениям ускорений против и по направлению движения часовой стрелки.
1.5. Метод координат
Свяжем с механизмом систему координат XOY. При этом xO = 0; yO = 0; xC = 0 м; yC = -OC м; уравнение направляющей ползуна yE = 0.
Координаты точки А:
XA = OAcos; YA = OAsin .
Расстояние AC = [(xA-xC)2+(yA-yC)2.
Расстояние KC = (AC2-AK2).
Координаты точки K:
![]() ,
,
где =ACK.
Координаты точки D:
![]() ,
,
где = CKD = 0.
Координаты точки S2:
 ,
,
где =CKS2 = 0 .
Координаты точки Е найдем с помощью уравнения связи между точками D и E:
(xE-xD)2+(yE-yD)2 = DE2
с учетом уравнения направляющей ползуна yE = 0.
Координаты точки S4:
 ,
,
где =EDS4 = 0.
В соответствии с приведенными выше соотношениями составляем программу расчета координат точек механизма и программу расчета кинематических параметров выходного звена на языке программирования VBA Excel.
’Глобальные переменные задаются оператором Dim
Dim OA, AK, KL, KD, DE, KS2, DS4
Dim fi, xa, ya, xc, yc, xk, yk, xl, yl, xd, yd, xs2, ys2, xs4, ys4, xe, ye
‘Подпрограмма расчета координат точек механизма
Sub koord()
xa = OA * Cos(fi)
ya = OA * Sin(fi)
xac = xa - xc: yac = ya - yc
AC = Sqr(xac ^ 2 + yac ^ 2)
KC = Sqr(AC * AC - AK * AK)
cg = KC / AC
sg = Sqr(1 - cg * cg)
xk = xc + (cg * xac - sg * yac) * KC / AC
yk = yc + (sg * xac + cg * yac) * KC / AC
xck = xc - xk: yck = yc - yk
xl = xk + xck * KL / KC
yl = yk + yck * KL / KC
xd = xk + xck * KD / KC
yd = yk + yck * KD / KC
ye = 0
xe = xd - Sqr(DE * DE - yd * yd)
xs2 = xk + xck * KS2 / AC
ys2 = yk + yck * KS2 / AC
xs4 = xd + (xe - xd) * DS4 / DE
ys4 = yd + (ye - yd) * DS4 / DE
End Sub
‘Подпрограмма вывода координат точек в таблицу для различных положений, задаваемых с помощью элемента управления – счетчик (SpinButton).
Private Sub SpinButton1_Change()
OA = 0.1: OC = 0.3: AK = 0.05: KD = 0.15:
KL = 0.45: KS2 = 0.2: DE = 0.38: DS4 = 0.15
xc = 0: yc = -OC
fi = SpinButton1.Value * 3.1416 / 180
koord
Cells(3, 12).Value = xa
Cells(3, 13).Value = ya
Cells(4, 12).Value = xk
Cells(4, 13).Value = yk
Cells(5, 12).Value = xl
Cells(5, 13).Value = yl
Cells(7, 12).Value = xd
Cells(7, 13).Value = yd
Cells(8, 12).Value = xe
Cells(8, 13).Value = ye
End Sub
‘Подпрограмма расчета кинематических параметров выходного звена для 12 положений механизма с выводом результатов в таблицу.
Sub dgr()
OA = 0.1: OC = 0.3: AK = 0.05: KD = 0.15:
KL = 0.45: KS2 = 0.2: DE = 0.38: DS4 = 0.15
xc = 0: yc = -OC
For i = 0 To 12
fii = i * 0.5236 ‘ 30 град = 0.5236 рад
fi = fii + 0.01: koord: xep = xe
fi = fii - 0.01: koord: xem = xe
fi = fii: koord
If i = 0 Then xe0 = xe
Cells(10 + i, 2).Value = xe0 - xe
ve = (xep - xem) * 50
Cells(10 + i, 3).Value = -ve
ae = (xep - 2 * xe + xem) * 10000
Cells(10 + i, 4).Value = -ae
Next
End Sub
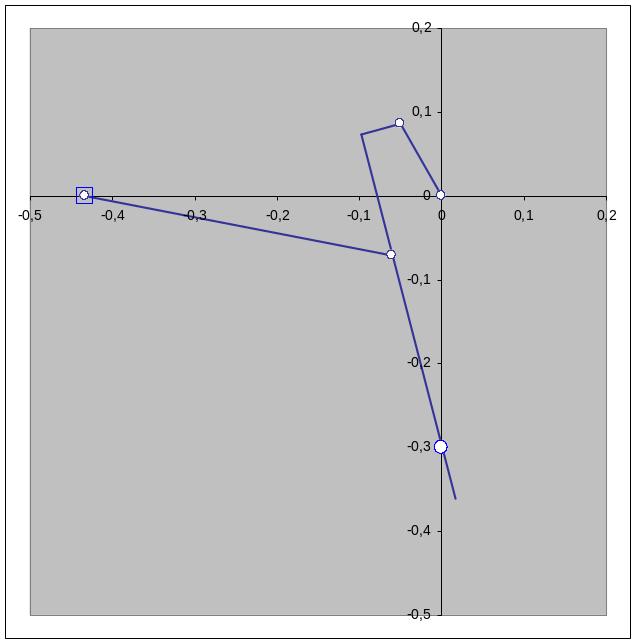
Результаты расчета координат точек в положении 4 занесены в таблицу.
Точка |
x |
y |
O |
0 |
0 |
A |
-0,05 |
0,086602 |
K |
-0,09836 |
0,073882 |
L |
0,016129 |
-0,36131 |
C |
0 |
-0,3 |
D |
-0,06019 |
-0,07118 |
E |
-0,43347 |
0 |
Схема механизма, построенная с использованием диаграмм типа точечная.
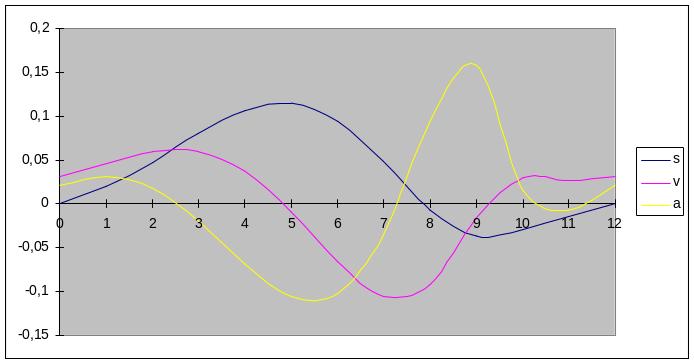
Результаты расчета кинематических параметров выходного звена.
N |
s |
v |
A |
0 |
0 |
0,030812 |
0,021717 |
1 |
0,019815 |
0,045713 |
0,03133 |
2 |
0,047689 |
0,059566 |
0,017636 |
3 |
0,079861 |
0,0601 |
-0,01909 |
4 |
0,106482 |
0,037207 |
-0,06878 |
5 |
0,114526 |
-0,00978 |
-0,10605 |
6 |
0,094461 |
-0,06651 |
-0,10166 |
7 |
0,04794 |
-0,10545 |
-0,03582 |
8 |
-0,00684 |
-0,09233 |
0,094267 |
9 |
-0,03684 |
-0,0161 |
0,158259 |
10 |
-0,02963 |
0,030199 |
0,015316 |
11 |
-0,01435 |
0,026557 |
-0,00685 |
12 |
4,53E-07 |
0,030813 |
0,021718 |
Кинематические диаграммы выходного звена (тип – гладкие).
1.6. Сравнение результатов кинематического анализа
Относительная погрешность определения скорости ползуна по методу диаграмм и по методу планов в положении 4 механизма
V = | VЕпл. – VЕдиаг.|100% / VЕпл. =
= |0,72 – 0,73|100%/0,72 < 5 %.
Относительная погрешность определения ускорения ползуна по методу диаграмм и по методу планов в положении 4 механизма
a = | aЕпл. – aЕдиаг.|100% / aЕпл. =
= |28,4 – 27,8|100% /28,4 < 5 %.
Вид диаграмм, построенных графическим путем и диаграмм, полученных численным путем, одинаков.