

Динамические модели автомобилей в виде систем с конечным числом степеней свободы.
Динамические модели автотранспортных средств могут быть плоскими и пространственными.
I. Плоская модель 2X осного автомобиля
M - масса
Q - момент инерции
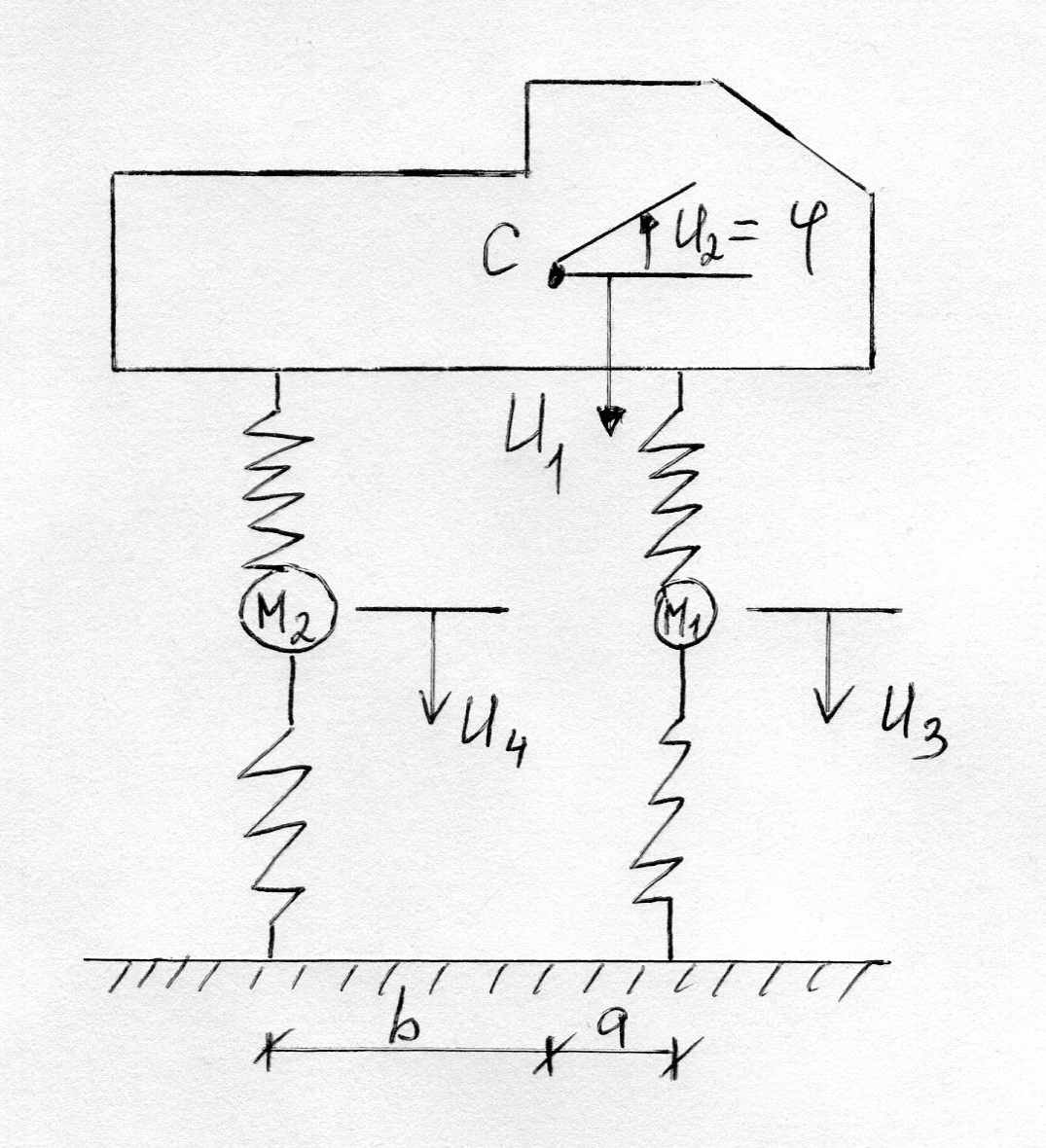
U1 - вертикальное перемещение кузова
U2 = φ - угол поворота кузова в продольной плоскости
U3 - вертикальное перемещение передней оси
U4 - вертикальное перемещение задней оси
При движении с постоянной скоростью по дороге можно такую модель описать системой с 4мя степенями свободы.
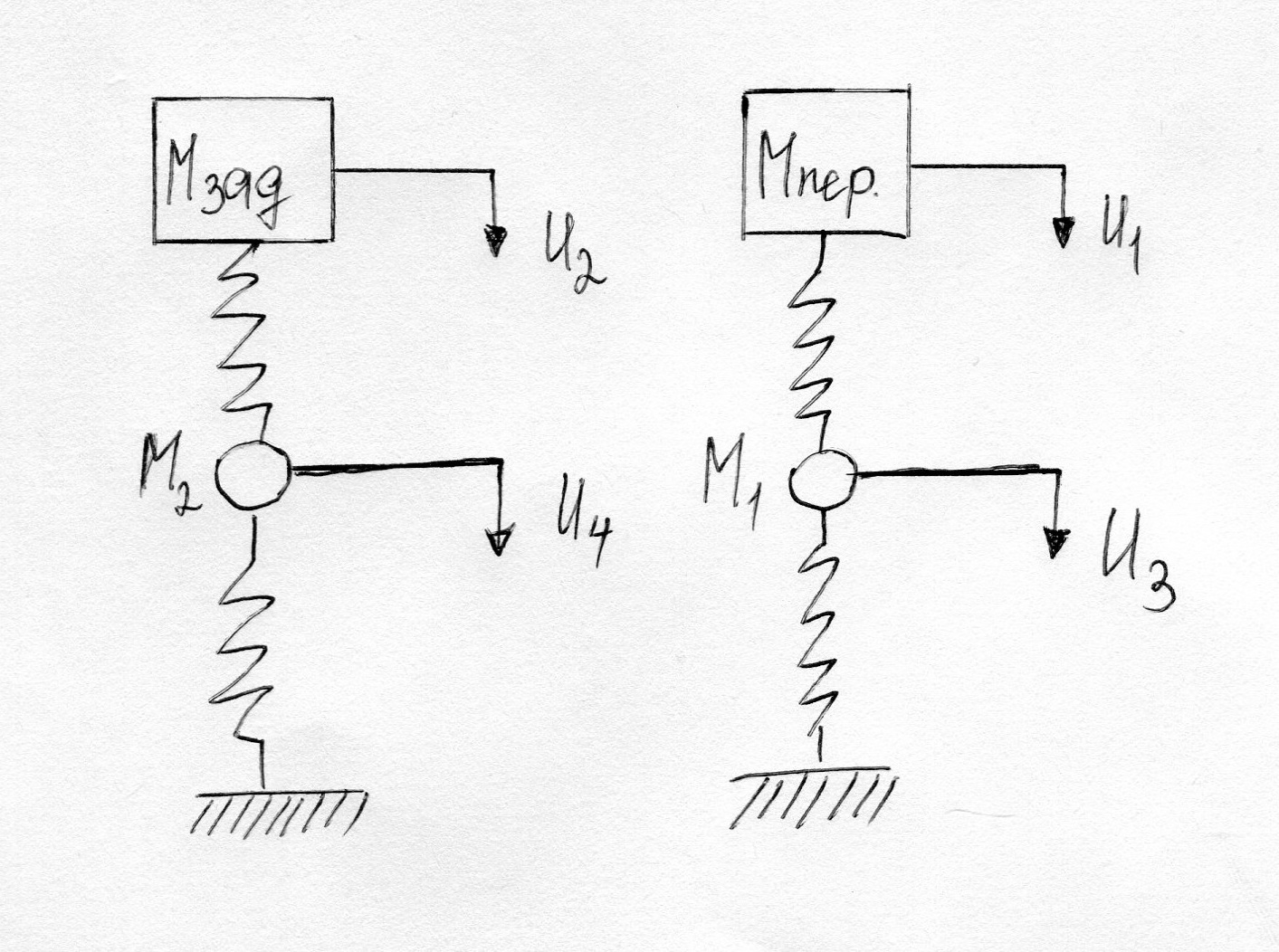
Плоские модели 2х-осной модели при условии, когда
θ≈Mab , могут быть представлены в виде 2х независимых расчетных схем.
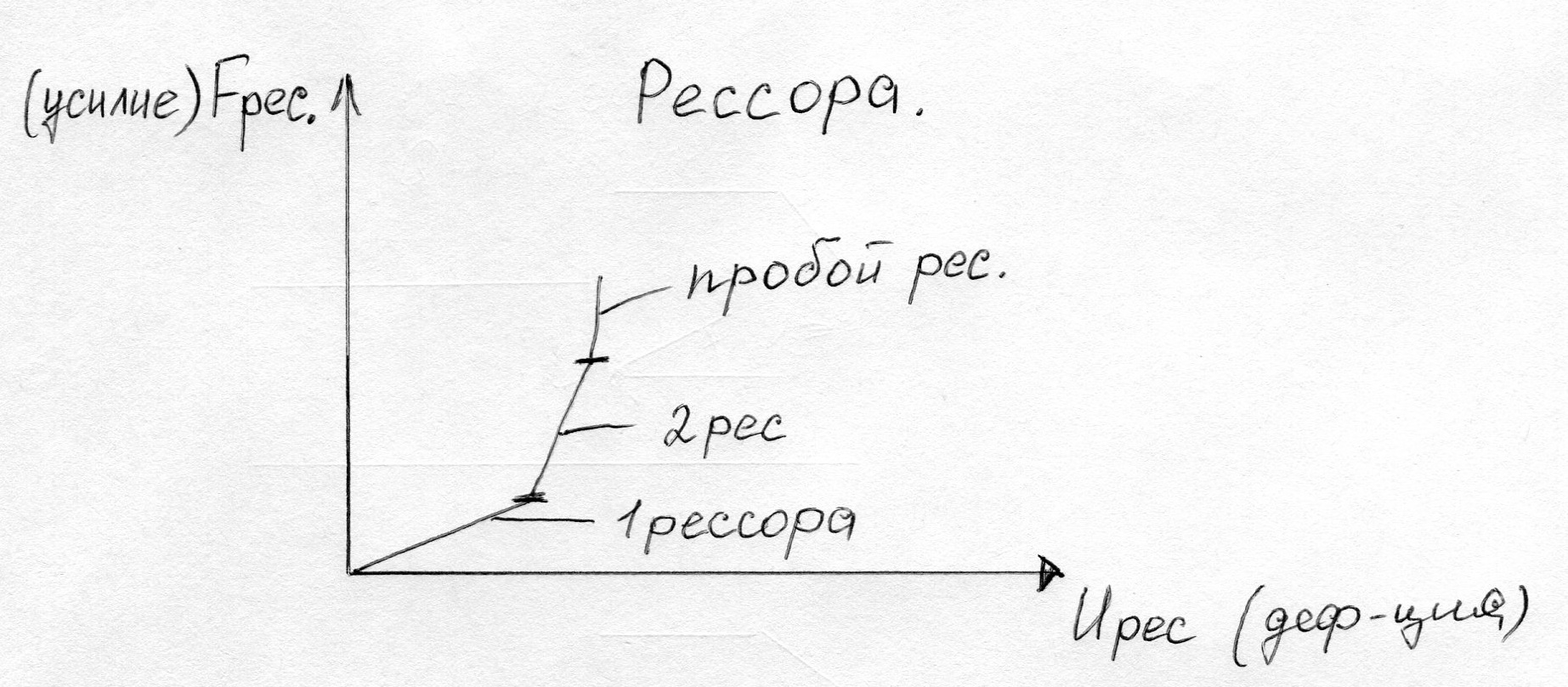
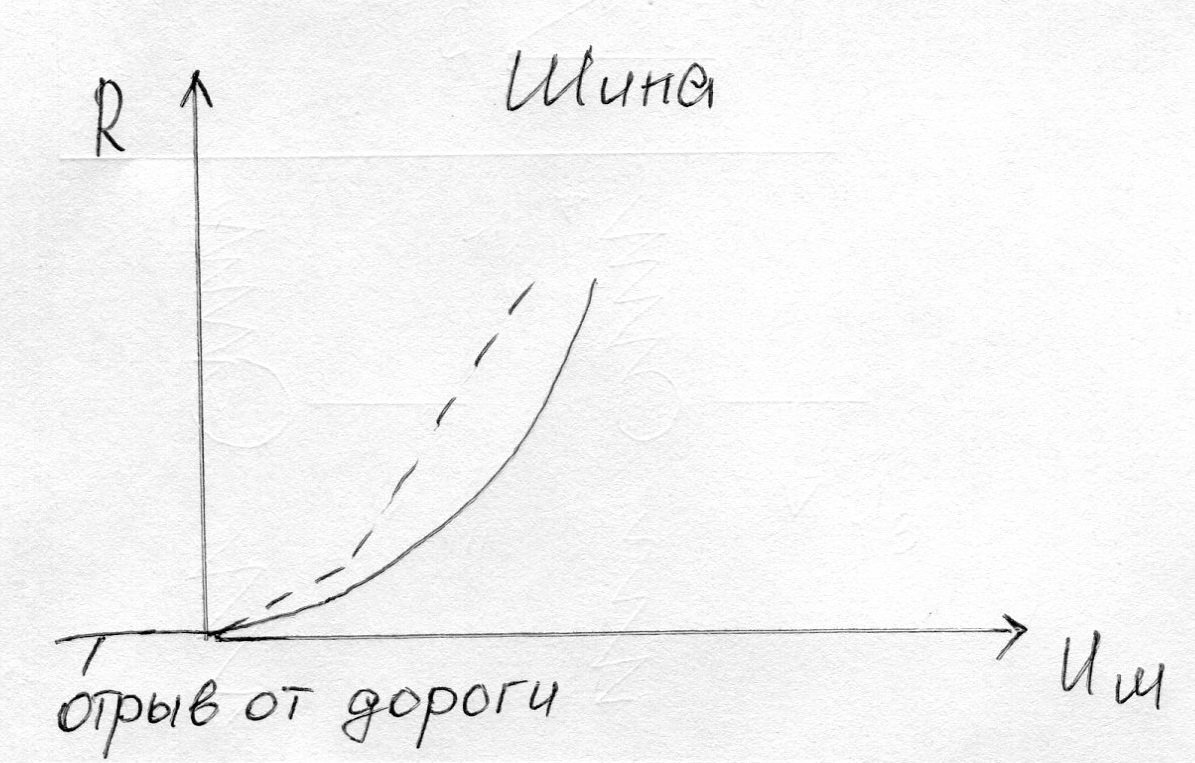
В автомобилях шины и рессоры моделируются нелинейно упругими связями.
II. Пространственная модель автомобиля.
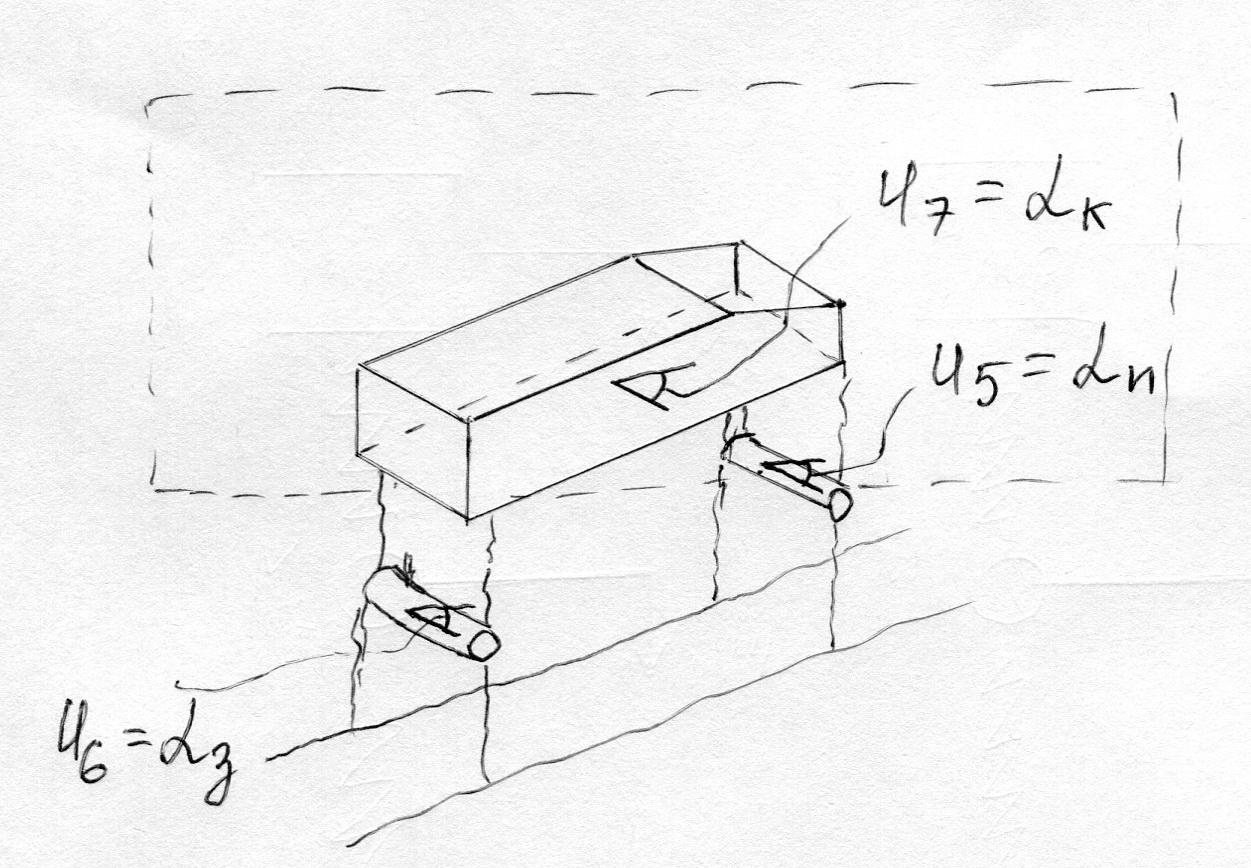
U5=αn - поперечный крен передней оси;
U6=αз - поперечный крен задней оси;
U7=αк - поперечный крен кузова.
Дополнительно к 4м степеням свободы плоской модели.
Плоская модель может использоваться при одинаковых микропрофилях под левой и правой колеёй.
Матрица жесткости 2х массовой модели автомобиля.
Система с 2мя степенями свободы.
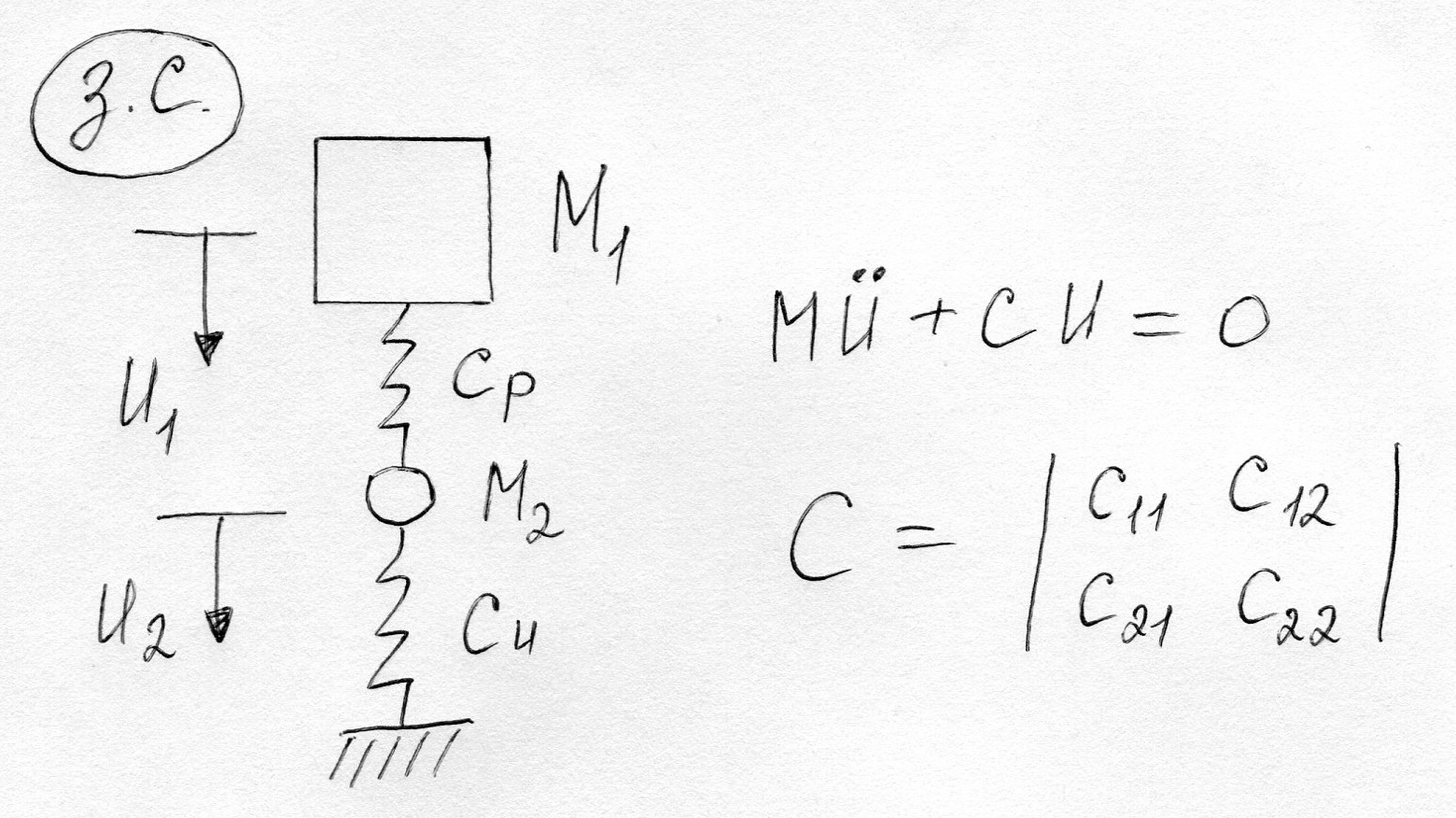
Примем основную систему метода перемещений
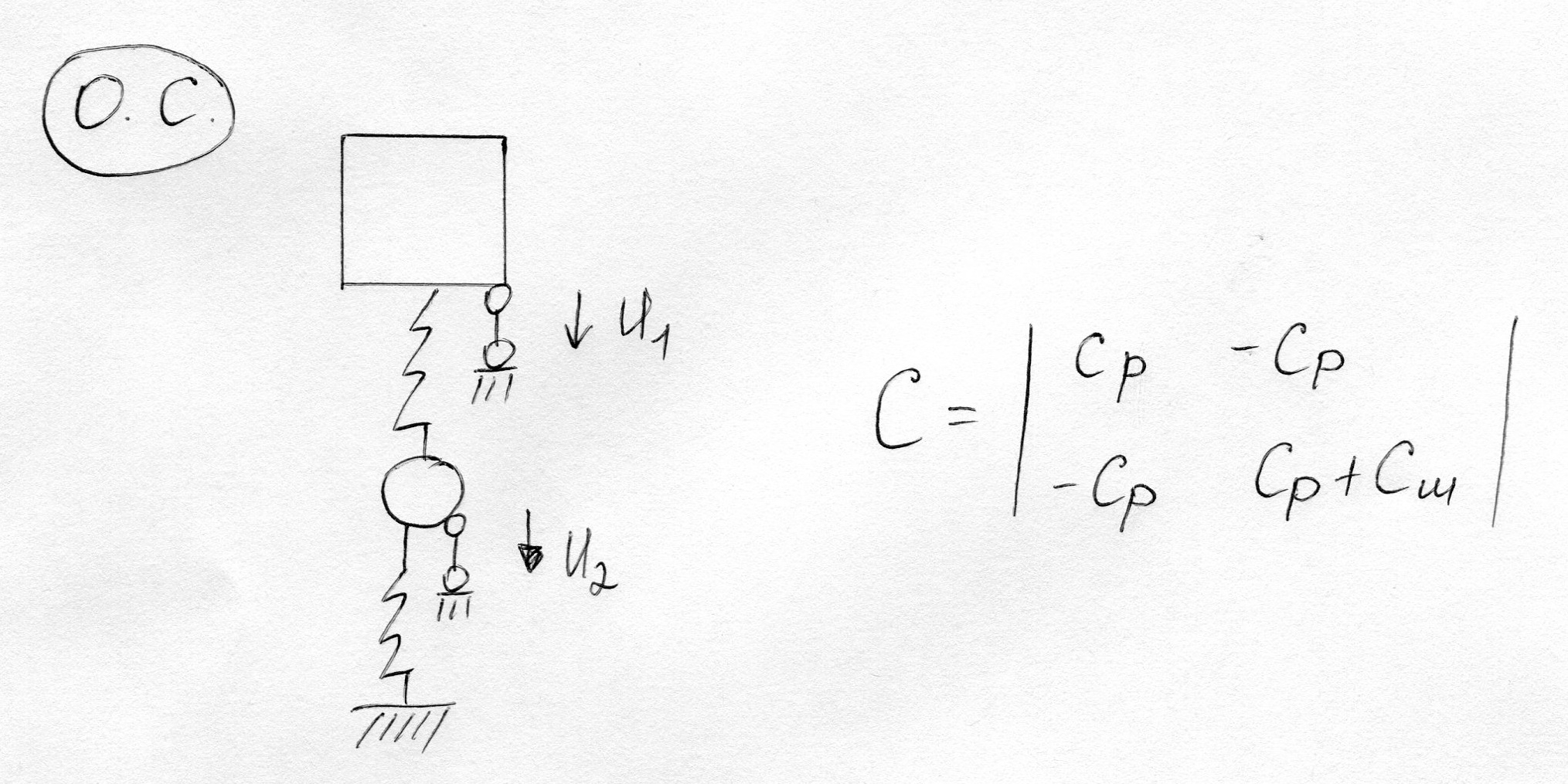
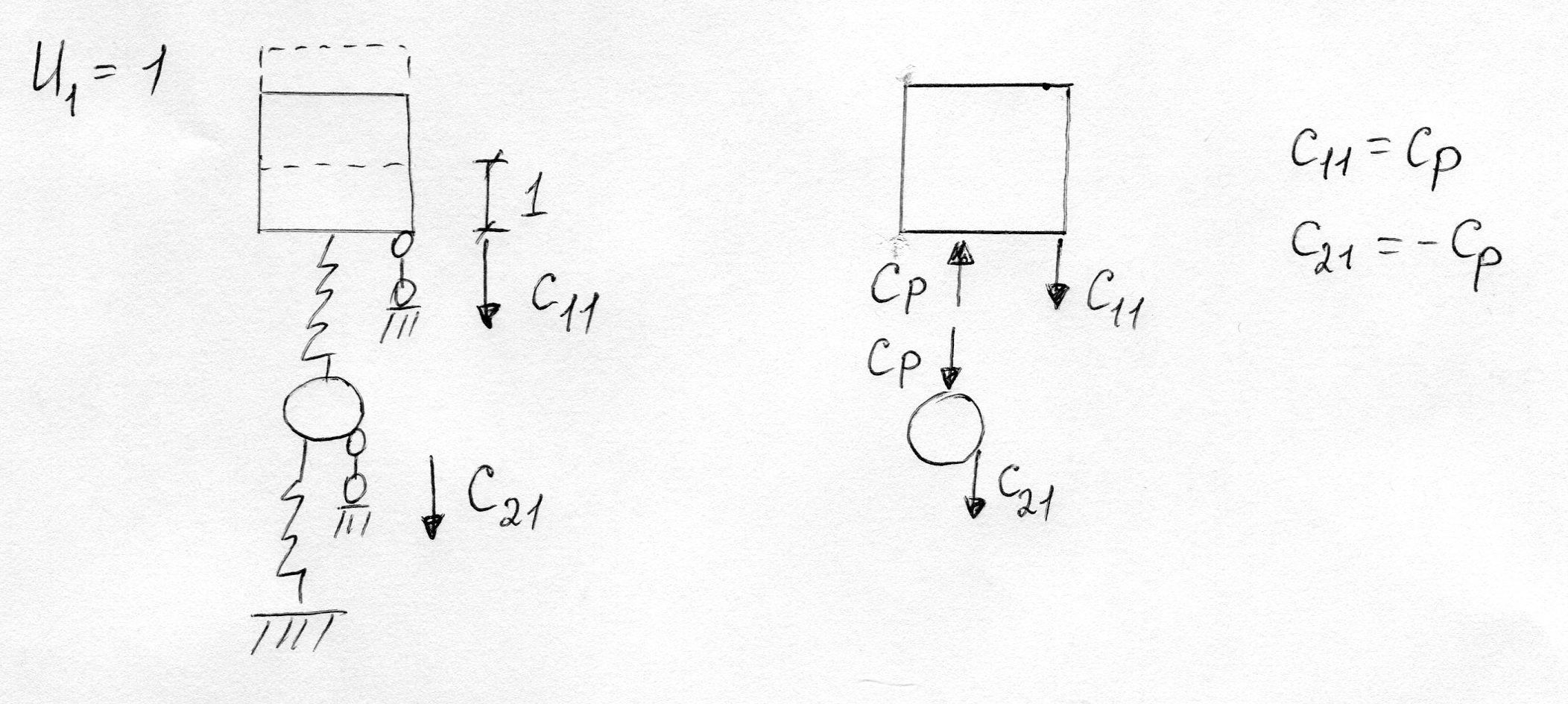
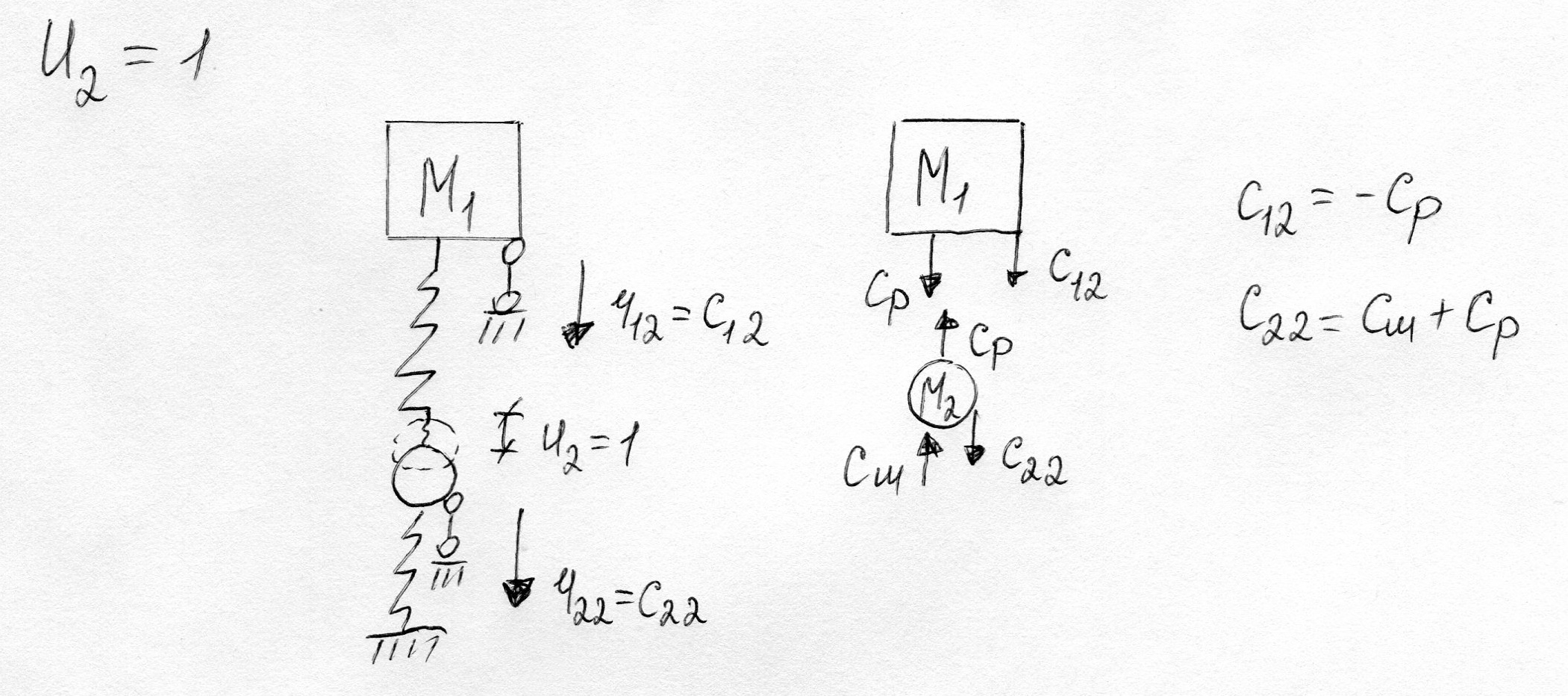
Отметим, что в матрице жесткости так же, как и в матрице коэффициентов канонических уравнений метода перемещений, выполняются два условия:
Главные коэффициенты положительны
Побочные коэффициенты, симметричные относительно главной диагонали, равны между собой.
сij=cji
Вычислим собственные частоты 2х массовой модели.
Подставим в формулу (г) (перед (65))
 = 0
= 0
(С11-М1∙k2)(С22-М2∙k2)-C12∙C21=0
M1∙M2∙k4-(M2∙C11+M1∙C22) ∙k2 - C122+C11∙C22 = 0
(k2)2
- ( )
∙k2
-
)
∙k2
-
 ∙
(C122-C11∙C22)
= 0
∙
(C122-C11∙C22)
= 0
k21,2=
 ∙
(
)
∙
(
)
 = 0
= 0
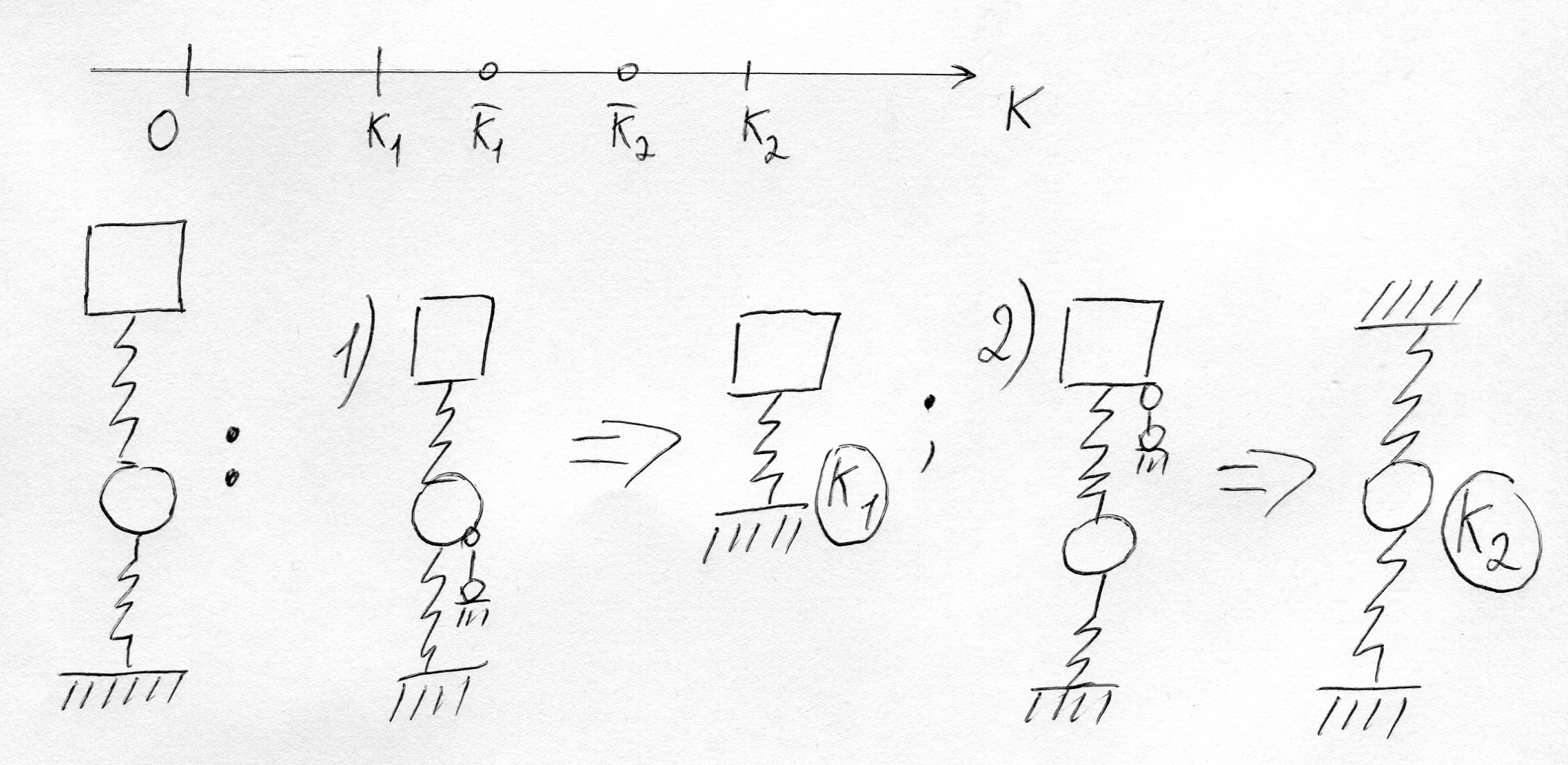
Парциальные системы для 2х массовой модели совпадают с приближенными значениями частот 1 массовой модели, и их частоты находятся между частотами 2х массовой модели.
Переезд 2х массовой модели через неровность.
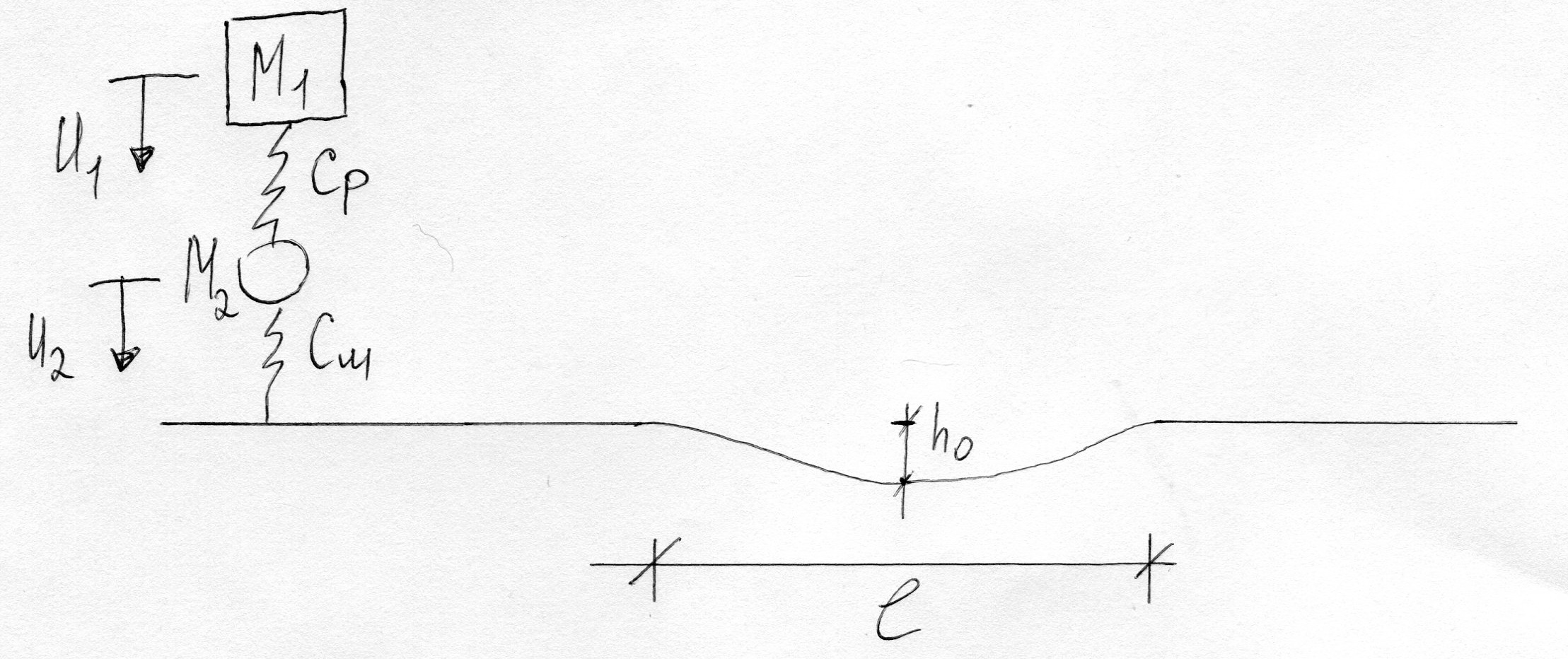
h(t)=
 (1-cos
(1-cos )
=
(1-cos
)
=
(1-cos ),
),
где ω =

M +CU=P(t)
(а)
+CU=P(t)
(а)
Дифференциальное уравнение без учета сопротивления можно записать в следующем виде, который можно получить из уравнения (а):
 (69)
(69)
F(ν)- усилие в рессоре, является функцией дифференциации в рессоре.
F(ν) = f(ν), ν=U2-U1 - в линейном случае.
F(ν) = Сp(U2-U1)
R(w) - давление автомобиля на проезжую часть
R(w)=f(w), w = U1 - h (1)
R(w)=Cш(U1-h)
 (70)
(70)
В уравнении (69) в отличии от формул учтены силы собственного веса.
Лекция № 8
Переезд двух массовой модели через неровность.
 ;
;
где

 (а)
(а)
Дифференциальные уравнения без учета сопротивления можно записать в следующем виде, которое можно получить из уравнения (а)
 (69)
(69)
F(v) - усилие в рессоре, является функцией дифференцирования в рессоре.
F(v)=f(v),
 -
в линейном случае.
-
в линейном случае.
F(v)=
R(w) - давления автомобиля на проезжую часть.
R(w)=f(w),
w= -h(l)
-h(l)
R(w)=
 (70)
(70)

В уравнении (69) в отличие от функции учтены силы собственного веса.