

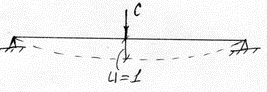
Понятие коэффициента жесткости для систем с 1 степенью свободы.
Наряду с коэффициентом податливости в динамических расчетах используется коэффициент жесткости (с).
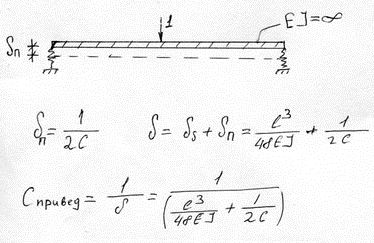
с – величина силы (пары сил) которую необходимо приложить к инертному элементу, чтобы вызвать его единичное перемещение (линейное или угловое)
![]() (5)
(5)
Определение и при последовательном и параллельном соединении упругих связей.
Воспользуемся вычислением , путем суммирования перемещений за счет деформирования каждой связи.
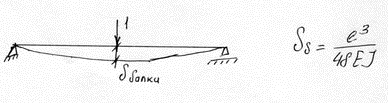
Решение этой задачи основывается на принципе независимости сил, в соответствии с которыми перемещения от действия совокупности сил равно сумме перемещений от каждой силы в отдельности.
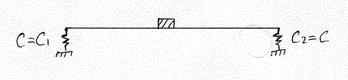
Упругие связи при своем соединении могут быть соединены по одной из следующих схем:
Параллельное соединение
Последовательное соединение
1. Параллельное соединение
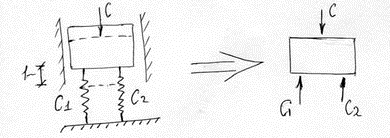
С-С1-С2=0; С= С1+С2 (6)
При параллельном соединении упругих связей, коэффициенты жесткости складываются.
2, Последовательное соединение
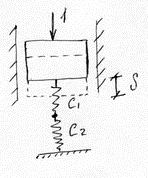
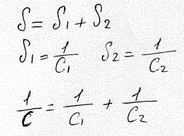
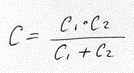 (7)
(7)
Лекция № 2
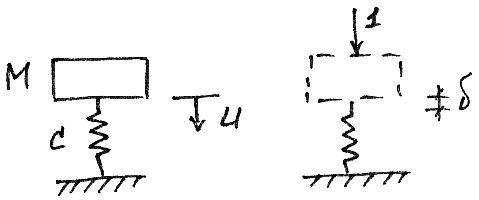
Дифференциальное уравнение движения систем с одной степенью свободы.
В зависимости от применения характеристик упругих связей, используются две формы уравнения движения:
1. Прямая форма – на основе использования коэффициента жесткости c.
2. Обратная форма - на основе коэффициента податливости .
1)Прямая форма:
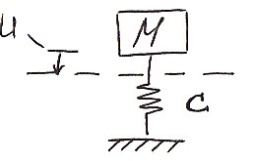
Вывод уравнения движения будем выполнять на основе правила Даламбера.
В соответствии с этим
правилом к действующим на конструкцию
силам присоединяются силы инерции,
которые в случае поступательного
движения равны
![]() ,
а
в случае вращения
,
а
в случае вращения
![]() ;
;
Рассмотрим все силы, действующие на тело:
1) Cобственный
вес инертного элемента
![]() ;
;
2) Силы
упругости
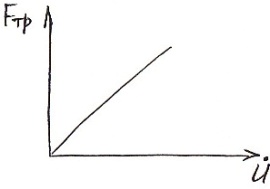
![]()
Формула (11) применима
только для линейно-деформируемых систем
tg =c.
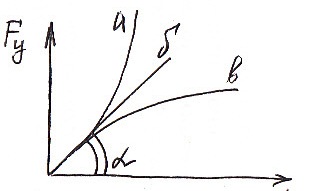
а) жесткая характеристика жесткости;
б) линейная характеристика жесткости;
в) мягкая характеристика жесткости.
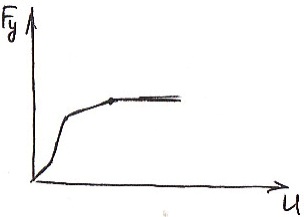 (кусочно-линейная)
(кусочно-линейная)
В нелинейных деформируемых системах характеристика жесткости является переменной.
3) Силы неупругого сопротивления (силы трения).
Они могут быть представлены по одной из моделей:
- сила вязкого сопротивления (сила трения зависит от скорости перемещения).
![]()
λ – коэффициент вязкого сопротивления.
-модель сухого трения (сила Кулона).
![]()
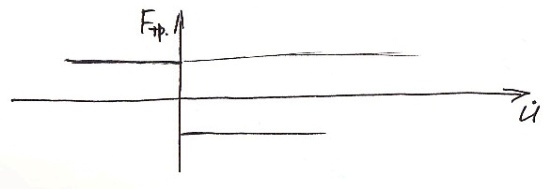
![]()
-модель Сорокина. Она является комплексной, в ней силы терния представлены вещественной и мнимой частями.
![]()
- действительная часть, которая описывает величину силы трения.
i- мнимая часть, и описывает величину запаздывания трения по сравнению с другими нагрузками.
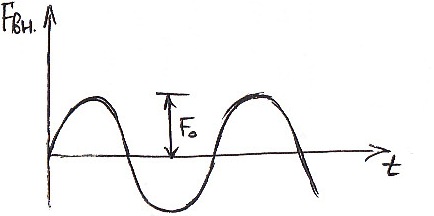
4) Силы возмущения.
Внешние силы могут описываться в зависимости от характера нагрузок различными выражениями.
![]() –
гармонический характер изменения.
–
гармонический характер изменения.
ЗАМЕЧАНИЕ о необходимости учета сил тяжести:
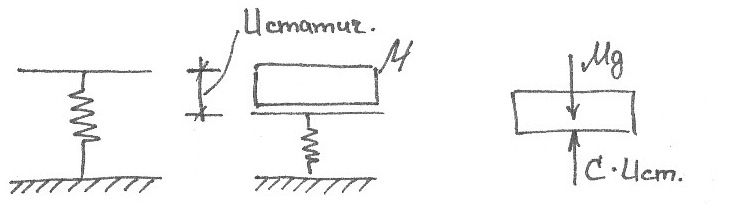
![]()
![]()
Силы тяжести уравновешиваются силами упругости, возникающими при статическом деформировании связи, поэтому в дальнейшем силы тяжести учитывать не будем. При этом будем отсчитывать отклонение системы от его положения, которое занимает система под действием сил тяжести.
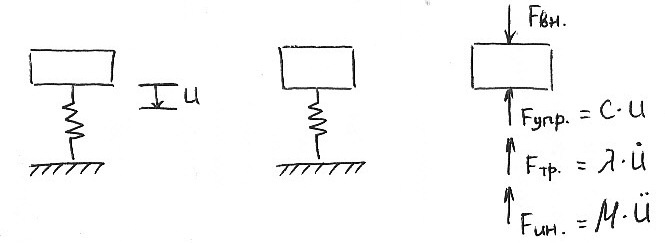
В соответствии с правилом Даламбера для любого положения имеет место механическое воздействие:
![]() -
дифференциальное уравнение вынужденных
колебаний системы с учетом сопротивления.
-
дифференциальное уравнение вынужденных
колебаний системы с учетом сопротивления.
![]() -
дифференциальное уравнение свободных
колебаний с учетом сопротивления.
-
дифференциальное уравнение свободных
колебаний с учетом сопротивления.
![]() -
дифференциальное уравнение колебаний
без учета сил трения.
-
дифференциальное уравнение колебаний
без учета сил трения.
Свободные колебания системы с одной степенью свободы.
Будем исходить из уравнения (19)
![]() (1/м);
(1/м);
![]() -
дифференциальное уравнение II
порядка с постоянными коэффициентами.
-
дифференциальное уравнение II
порядка с постоянными коэффициентами.
![]() ,
где
,
где
![]()
Пусть
![]()
(б) в (а), получим:
![]()
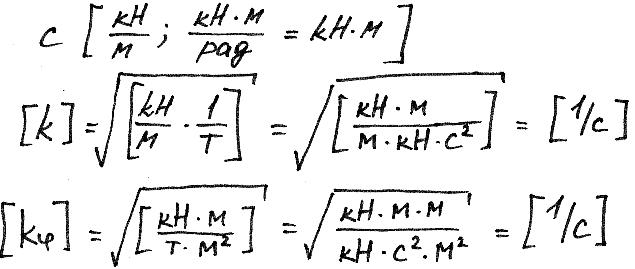
![]() -
частота колебаний [1/c]
-
частота колебаний [1/c]
Бывает двух типов:
- циклическая;
- техническая.
Циклическая частота – количество колебаний за 2 сек.
Техническая частота – количество колебаний за 1 сек.
![]() ,
[Гц]
,
[Гц]
Период колебаний – продолжительность одного полного колебания.
![]() ,[c]
,[c]
![]()
![]()
![]()
![]()
![]()
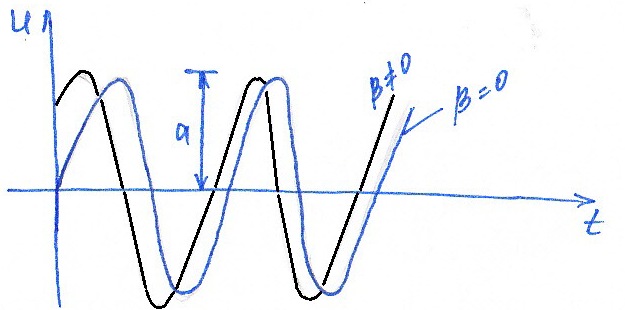
-начальная фаза (из (20))
а – амплитуда- максимальное отклонение от положения статического равновесия.
Значения а и определяются по начальным условиям.
Т.к. здесь два параметра, то и условий два:
1) при t=0, U=U0 – начальное перемещение;
2) при t=0, (U’=U0’) - начальная скорость.
Подставим первое условие в (20):
1)
![]()
![]()
Подставим второе условие в (20 а):
2)
![]()
![]()
![]()
Возведем в квадрат оба (*) и сложим их:
![]()
![]()
Видим, что амплитуда зависит от начальной скорости и начального перемещения.
При отсутствии сопротивления в системе, колебания носят незатухающий гармонический характер с частотой, которая является собственной для системы.
Изменение собственной частоты возможно, но за счет:
1.изменения инертности (массу, либо момент инерции);
2.изменение жесткости упругой связи.
Дифференциальное уравнение систем с одной степенью свободы в обратной форме.
Вывод уравнений движения выполнен на основе правила Даламбера и независимости действия сил.
Кроме фактических действующих сил необходимо учесть силы инерции на ускорение.
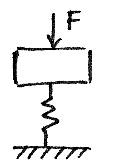 F – равнодействующая всех сил, действующих
на систему ( в том числе и силы упругости).
F – равнодействующая всех сил, действующих
на систему ( в том числе и силы упругости).
Учтем следующие силы: