

3.5 Контрольні питання
Чим визначається частота обертання двигуна постійного струму?
Як виглядає механічна характеристика двигуна постійного струму незалежного збудження?
Як виглядає механічна характеристика двигуна постійного струму послідовного збудження?
Як зміниться крутячий момент двигуна, якщо струм якоря і магнітний потік збудження збільшити в 2 рази?
Як зміниться частота обертання двигуна, якщо при постійній напрузі живлення магнітний потік збудження зменшився?
Як змінити напрям обертання двигуна?
Що станеться, якщо двигун послідовного збудження підключити до мережі без механічного навантаження на валу?
ЛАБОРАТОРНА РОБОТА № 4
ДОСЛІДЖЕННЯ ХАРАКТЕРИСТИК ТРИФАЗНОГО АСИНХРОННОГО ДВИГУНА З КОРОТКОЗАМКНЕНИМ РОТОРОМ
Мета роботи – експериментальне дослідження характеристик трифазного асинхронного двигуна з короткозамкненим ротором, а також освоєння методів випробувань електричних машин.
4.1 Теоретичні відомості
Асинхронною машиною називається електромеханічний перетворювач, в якому виникнення моменту на валу ротора можливо лише при різних частотах обертання магнітного поля і ротора. Трифазні асинхронні машини з короткозамкненим ротором завдяки своїй технологічності, надійності, низькій вартості і великому терміну служби складають основну долю світового парку електричних машин. Основними елементами конструкції асинхронної машини є статор і ротор.
Статор – нерухома частина машини. Його осердя з метою зменшення втрат на вихрові струми набирають з штампованих листів електротехнічної сталі завтовшки 0,35 – 0,5 мм, ізольованих один від одного шаром лаку. У пази магнитопровода статора укладається обмотка. У трифазних двигунах обмотка трифазна. Фази обмотки можуть з'єднуватися в зірку або в трикутник залежно від величини напруги мережі.
Ротор – частина двигуна, що обертається. Магнітопроводом ротора є циліндр, набраний з штампованих листів електротехнічної сталі. У пазах ротора укладають обмотку. Залежно від типа обмотки ротори асинхронних двигунів діляться на короткозамкнені і фазні (з контактними кільцями). Короткозамкнена обмотка є неізольованими мідними або алюмінієвими стрижнями, сполученими з торців кільцями з цього ж матеріалу (“ біляча клітка ”).
Перетворення електричної енергії в механічну в асинхронному двигуні здійснюється за допомогою магнітного поля, що обертається. Необхідними умовами збудження магнітного поля, що обертається, є:
1) просторове зрушення осей котушок статора;
2) часове зрушення струмів в котушках статора.
Крутячий момент на валу асинхронного двигуна створюється за рахунок взаємодії магнітних полів статора і ротора. При цьому струм в роторних обмотках виникає під дією ЕРС, що наводиться полем статора. Для того, щоб така ЕРС виникала необхідно, щоб частота обертання ротора (тобто валу двигуна) була декілька менше, ніж частота обертання поля статора. Кількісна оцінка різниці частот обертання ротора і поля статора називається ковзанням:
![]() ,
в.о. (4.1)
,
в.о. (4.1)
де
![]() – синхронна частота обертання поля,
рад/с;
– синхронна частота обертання поля,
рад/с;
![]() – частота обертання вала, рад/с.
– частота обертання вала, рад/с.
Розрахувати номінальну частотою обертання валу двигуна знаючи його швидкість обертання можна по формулі:
![]() ,
рад/с. (4.2)
,
рад/с. (4.2)
Синхронна частота обертання поля залежить від конструкції двигуна і зворотно пропорційна числу пар полюсів:
![]() ,
рад/с (4.3)
,
рад/с (4.3)
де
![]() – кругова частота живлячої мережі,
рад/с;
– кругова частота живлячої мережі,
рад/с;
![]() – число пар полюсів машини.
– число пар полюсів машини.
Для асинхронних двигунів ковзання може змінюватися в межах від 1 (пуск) до величини, близької до 0 (холостий хід).
Процес перетворення електричної енергії, підведеної до двигуна з мережі, в механічну, що знімається з валу машини, супроводжується втратами. До асинхронного двигуна з мережі підводиться потужність:
![]() ,
Вт. (4.4)
,
Вт. (4.4)
Для того, щоб отримати величину потужності , споживаної двигуном з мережі, необхідно корисну потужність на валу розділити на ККД двигуна:
![]() ,
Вт. (4.5)
,
Вт. (4.5)
Корисна потужність на валу двигуна вимірюється безпосередньо або розраховується по формулі:
![]() ,
Вт. (4.6)
,
Вт. (4.6)
Однією
з найважливіших характеристик асинхронного
двигуна є механічна характеристика.
Механічною характеристикою в теорії
електричних машин прийнято називати
залежність моменту на валу двигуна від
ковзання
![]() ,
яка має вигляд, показаний на рис. 4.1.
,
яка має вигляд, показаний на рис. 4.1.
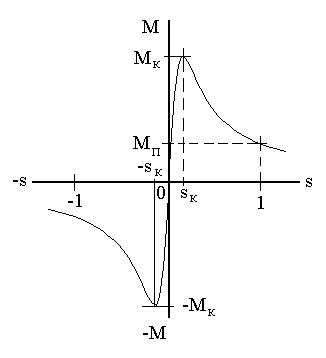
Рисунок 4.1 – Механічна характеристика АД
Основними параметрами механічної характеристики асинхронного двигуна є величина максимального моменту Мк і відповідне йому ковзання sк, яке називається критичним ковзанням. На практиці для розрахунку механічної характеристики користуються формулою Клосса:
 ,
.
(4.7)
,
.
(4.7)
Величина максимального моменту пропорційна квадрату живлячої напруги і зазвичай в 2-2,5 разу більше номінального моменту двигуна. При загальмованому роторі, наприклад у момент пуску, двигун розвиває пусковий момент, величина якого може бути порядком 1,3-1,8 від номінального моменту. Струм, споживаний двигуном при пуску, може в 5-6 разів перевищувати номінальний.
Механічна характеристика асинхронного двигуна може бути розрахована і через параметри схеми заміщення. В цьому випадку, зазвичай використовується Г-подібна схема заміщення (рис. 4.2), в якій контур намагнічення перенесений на вхідні затискачі, що дозволяє спростити розрахунок електромагнітного моменту.
Відповідно до цієї схеми заміщення електромагнітна потужність, що передається через повітряний зазор машини, визначається наступними співвідношеннями:
![]() ,
Вт. (4.8)
,
Вт. (4.8)
Крім того, як випливає з схеми заміщення:
![]() ,
А. (4.9)
,
А. (4.9)

Рисунок 4.2 – Схема заміщення АД
Якщо в (4.8) підставити (4.9) і (4.3), і вирішити його відносно моменту, то виходить рівняння механічної характеристики, виражене через параметри схеми заміщення:
 ,
.
(4.10)
,
.
(4.10)
де
![]() - реактивна складова опору короткого
замикання.
- реактивна складова опору короткого
замикання.
Дослідження знаменника на екстремум показує, максимальне значення моменту має місце при:
 ,
в.о. (4.11)
,
в.о. (4.11)
Після підстановки (4.11) в (4.10) можна отримати величину максимального моменту:
![]() ,
. (4.12)
,
. (4.12)
Відповідно,
величина пускового моменту виходить з
(4.10) підстановкою
![]() :
:
 . (4.13)
. (4.13)
Приведені співвідношення дозволяють, виходячи з каталожних даних двигуна, визначити параметри схеми заміщення, а потім розрахувати і побудувати механічну характеристику двигуна.
Робочі
характеристики асинхронного двигуна
відображають залежності частоти
обертання валу
,
коефіцієнта корисної дії
,
корисного моменту на валу
,
коефіцієнта потужності
![]() і струму
і струму
![]() від корисної потужності на валу двигуна
при постійних значеннях напруги
від корисної потужності на валу двигуна
при постійних значеннях напруги
![]() і частоти мережі
і частоти мережі
![]() .
.
Крива моменту декілька витягнута вгору, оскільки із збільшенням навантаження частота обертання валу декілька зменшується, а унаслідок того що , то при зменшенні момент повинен відповідно збільшиться. Коефіцієнт потужності при холостому ході невеликий (близько 0,2). По мірі збільшення навантаження він зростає, досягає найбільшого значення при навантаженні, близькому до номінального. Струм двигуна із зростанням навантаження збільшується спочатку повільно, а потім майже пропорційно підвищенню потужності .
Робочі характеристики можна отримати, або побудувавши кругову діаграму, або знімаючи їх на спеціальних гальмівних стендах.