

Общие сведения о разностно-дальномерных радионавигационных системах: предназначение, классификация, структурные схемы
Разностно-дальномерные радиотехнические системы иначе называются радиотехническими системами дальней навигации (РСДН). Они предназначены для точного определения подвижными объектами (самолетами, вертолетами, кораблями, подводными лодками) своего местоположения, находящимися в ее рабочей зоне.
Под рабочей зоной системы понимают область земной поверхности, в пределах которой с заданной вероятностью обеспечивается определение местоположения подвижного объекта по сигналам наземных станций со среднеквадратической ошибкой, не превышающей допустимого значения.
РСДН широко применяется при навигации самолетов, кораблей и подводных лодок. Они используются автономно и в составе комплексных систем навигации.
Определение местоположения объекта с помощью бортовой аппаратуры РСДН сводится к измерению относительного запаздывания радиосигналов, излучаемых наземными радиостанциями с известными координатами. В зависимости от типа применяемых радиосигналов различают импульсные (временные), импульсно-фазовые, фазовые и частотные РСДН.
По сравнению с другими навигационными системами РСДН обладает рядом преимуществ, основными из которых являются: высокая точность определения местоположения ЛА; большая дальность действия; неограниченная пропускная способность; возможность использования на любых высотах; скрытность определения навигационных параметров в виду отсутствия на борту передающих устройств.
К недостаткам РСДН можно отнести зависимость работы ведущей станции от ведомых, уязвимость антенн и сложность аппаратуры станций, необходимость периодического ввода поправок в аппаратуру станций на скорость распространения электромагнитных волн и использования на борту специальных вычислителей для преобразования гиперболических координат при определении места объекта.
В настоящее время в ВВС применяются импульсно-фазовые стационарные системы РСДН-3/10, РСДН-4, РСДН-5 и их подвижный вариант РСДН-10, фазовые системы РСДН-20, в которых: используют соответственно длинноволновый и сверхдлинноволновый диапазон радиоволн.
Кроме того, при полетах по международным трассам могут использоваться зарубежные импульсно-фазовые системы «Лоран» и фазовые системы «Омега».
РСДН состоит из наземного оборудования (наземных станций) и бортовой аппаратуры, устанавливаемой на подвижных объектах.
Наземные станции представляют собой мощные радиопередатчики с аппаратурой управления и синхронизации. Для определения местоположения подвижного объекта система должна состоять не менее чем из трех наземных станций. Эти станции объединяются в единые группы. Они разнесены одна от другой на расстояния, называемые базой. В общем случае группа наземных станций образует цепочки, в состав которых могут входить до восьми станций.
В каждой группе одна станция является ведущей, остальные ведомые. Ведущая станция синхронизирует работу ведомых станций, обеспечивая согласованные режимы излучения по времени и частоте всех станций данной группы (цепочки).
Группы наземных станций системы могут быть стационарного и мобильного вариантов.
Наземные станции стационарного варианта представляют собой мощные радиопередающие центры, состоящие из комплекса радиотехнического, специального и связного оборудования.
В состав радиотехнического оборудования входят: мощные передающие устройства, комплекс аппаратуры генерирования и формирования эталонных частот, аппаратура формирования навигационных пакетов, управления и контроля, приемные устройства сигналов синхронизации, антенные системы с элементами согласования и настройки, системы управления, блокировки и сигнализации. Особое место в составе станции занимают антенно-мачтовые сооружения, высота которых может достигать 460 м, а стоимость составляет до 60% стоимости всей станции. В качестве резервных антенных систем на стационарных станциях используются привязные аэростатные антенны.
В состав специального (общепромышленного) оборудования входят: система энергоснабжения станции с автономными электростанциями, система водяного и воздушного охлаждения радиотехнической аппаратуры, система сжатого воздуха с собственными компрессорными станциями.
К связному оборудованию относятся коротковолновые радиостанции и аппаратура проводной телефонной и телеграфной связи. Кроме того, в состав станции входят контрольные пункты, которые оборудуются либо бортовой аппаратурой либо аппаратурой управления и контроля, подобное той, которая устанавливается на станциях РСДН. Контрольные пункты предназначены для контроля параметров синхронизации наземных станций и навигационных параметров в рабочих-зонах систем.
Наземные станции мобильного варианта обладают меньшей мощностью и могут самостоятельно перемещаться для: развертывания в указанном районе. Они имеют сборно-разборные или телескопические антенно-мачтовые устройства, высотой 28…52 м. Станции мобильного варианта могут использоваться при совместной работе со стационарными станциями.
На подвижных объектах устанавливается бортовой приемоиндикатор (БПИ), с помощью которого осуществляется прием радиосигналов наземных станций системы РСДН. При этом основой БПИ являются приемник и устройство для измерения временного интервала между моментами приема радиосигналов от ведущей и ведомых наземных станций системы.
БПИ определяет гиперболические координаты подвижного объекта и выдает результат на специальное табло. Одновременно данные могут передаваться в цифровые преобразователи координат или в бортовую ЭВМ для преобразования: гиперболических координат в истинные или ортодромические координаты.
В зависимости от подвижного объекта бортовая аппаратура системы может иметь различную комплектацию.
Принцип действия системы РСДН приведен на рис. 2. Ведущая станция А и две ведомые станции Б и В, расположенные по обе стороны от ведущей на примерно одинаковых базовых расстояниях от нее b1 = b2 = b, образуют цепочку из трех синхронизированных наземных станций.
Точка М соответствует расположению подвижного объекта .(самолета, корабля) с установленным на нем бортовым приемоиндикатором.
Сигналы, излучаемые ведущей станцией А, через определенный интервал, равный времени распространения радиоволн по базам между ведущей и ведомыми станциями, достигают ведомых станций Б и В. Ведомые станции, приняв сигналы ведущей станции, используют их для синхронизации по фазе и огибающей собственных сигналов. Сигналы ведомых станций излучаются относительно моментов приема сигнала ведущей станции с определенными, строго фиксированными задержками, значение которых всегда выбирается таким образом, чтобы импульсы одной станции не перекрывались импульсами других станций синхронизируемой цепочки во всей рабочей зоне системы.
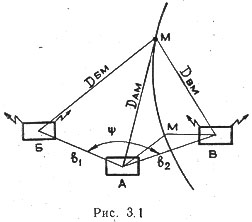
Рис. 2. Принцип определения МПЛА в РСДН
Сигналы, излучаемые передающей антенной ведущей станции А, достигают приемной антенны бортового приемоиндикатора подвижного объекта М через временной интервал tам, пропорциональный расстоянию Dам от подвижного
объекта
до ведущей станции, т. е.
 (3)
(3)
Сигналы,
излучаемые передающими антеннами
ведомых станций Б
и В, достигают
приемной антенны бортового приемоиндикатора
М
соответственно
через временные интервалы tбм
и
tвм,
пропорциональные расстояниям Dбм
и
DВМ
от
подвижного объекта до ведомых станций,
т. е.
 , (4)
, (4)
 (5)
(5)
Бортовой приемоиндикатор производит непрерывные измерения по фазе и огибающей радиоимпульсов навигационных пакетов разностей времен прихода сигналов (ΔtАБ и ΔtАВ) от двух пар станций АБ и АВ в точку М расположения подвижного объекта:
 (6)
(6)
 (7)
(7)
где tАб и tав - время распространения сигнала по базе от фазового центра передающей антенны ведущей станции А до фазового центра передающих антенн ведомых станций Б и В;
tКБ и tКВ - кодовые задержки ведомых станций Б и В, равные, временным интервалам между моментами прихода сигнала ведущей станции, и моментами излучения сигналов ведомых станций.
Кодовые задержки вводятся с целью обеспечения необходимой последовательности прихода сигналов ведомых станций на ЛА во всей рабочей зоне, а в военное время для затруднения использования систем противником.
Постоянные величины tзБ=tАБ+tКБ tзВ=tАВ+tКВ называются задержками излучения ведомых станций Б и В и определяются на станциях в процессе калибровки системы с помощью подвижных контрольных пунктов.
В бортовых приемоиндикаторах подвижных объектов истинные значения постоянных величин tзБ и tзВ учитываются при измерении разности времен ∆tАБ и ∆tАВ, называемые навигационными параметрами системы.
Измерения навигационных параметров ∆tАБ и ∆tАВ по фазе и используемые для устранения многозначности фазовых отсчетов измерения по огибающей радиоимпульсов навигационных пакетов выполняются по высокостабильному поверхностному сигналу в пределах временного интервала, примерно равного первой половине переднего фронта радиоимпульса пакета, свободной от влияния нестабильного, отраженного от ионосферы сигнала.
Измеренные бортовым приемоиндикатором значения навигационных параметров ∆tАБ и ∆tАВ соответствуют определенной разности расстояний ∆DАБ и ∆DАВ от подвижного объекта М до ведущей станции А и каждой из ведомых станций Б и В (см. рис. 2). Если объект будет двигаться по траектории, на которой значение навигационного параметра не изменяется (т. е. разность расстояний ∆DАБ или ∆DАВ постоянна), то такой траектории соответствует вполне определенная линия положения на земной поверхности - плоская гипербола. Причем для расстояний 1000…1500 км кривизну земной поверхности можно не учитывать. В фокусах гиперболы, проходящей через точки М и М', находятся ведущая и одна из ведомых станций. Однако по одной паре станций, дающих при измерении навигационного параметра множество непересекающихся гипербол, определить местоположение подвижного объекта невозможно. Поэтому используют семейство пересекающихся гиперболических линий положения, образованных двумя парами станций, которые наносятся на карту и оцифровываются в микросекундах (через 50…100 мкс), поскольку бортовой приемоиндикатор подвижного объекта непосредственно измеряет не разности расстояний, а разностные временные интервалы.
При ручном способе определения гиперболических координат местоположения подвижного объекта необходимо найти по карте по отсчетам бортового приемоиндикатора две пересекающиеся линии положения. Точка пересечения этих линий даст искомые гиперболические координаты местоположения подвижного объекта. Следует учесть, что для правильного определения на карте искомых линий положения необходимо в отсчёты бортового приемоиндикатора ввести поправки, учитывающие изменения скорости распространения радиоволн по трассам между наземными станциями и подвижным объектом в зависимости от эффективной проводимости подстилающей поверхности. Измеренные бортовым приемоиндикатором временные интервалы ∆tАБ и ∆tАВ могут быть при автоматическом способе преобразованы в геодезические или ортодромические координаты местоположения объекта с помощью цифровых преобразователей координат или бортовых электронно-вычислительных машин.