Y
1. Классификация радиотехнических средств навигации 1
2. Навигационные системы определения координат: местные и глобальные 3
3. Угловые навигационные параметры (курс, крен, тангаж) 5
4. Скорость полета летательного аппарата (истинная, воздушная, путевая и вертикальная) 6
5. Высота полета летательного аппарата (абсолютная, истинная, относительная, барометрическая) 7
6. Определение местоположения ЛA способом линий (поверхностей) положения 7
7. Определение местоположения ЛA способом счисления пути 9
8. Определение местоположения ЛA обзорно-сравнительным способом 9
9. Определение направления методом максимума: сущность, точность, достоинства и недостатки 10
10. Определение направления методом минимума: сущность, точность, достоинства и недостатки 11
11. Определение направления равносигнальным методом: сущность, точность, достоинства и недостатки 12
12. Импульсный РНД с ретрансляцией сигнала: структурная схема, принцип работы, достоинства и недостатки 13
13. Импульсный РНД без ретрансляции сигнала: структурная схема, принцип работы, достоинства и недостатки 15
14. Общие сведения об угломерных радионавигационных системах: предназначение, классификация, структурные схемы 16
15. Общие сведения о разностно-дальномерных радионавигационных системах: предназначение, классификация, структурные схемы 18
16. Общие сведения о системах посадки: предназначение, решаемые задачи, состав 22
17. Упрощенные системы посадки: предназначение, состав оборудования, задачи, решаемые ее элементами 26
18. Радиомаячные системы посадки: предназначение, состав оборудования, задачи, решаемые ее элементами 28
19. РСБН: предназначение, решаемые задачи, принцип построения 31
20. РСБН-4Н: состав оборудования, тактико-технические характеристики 32
21. Требования к размещению радиомаяка РСБН-4Н на аэродроме и на позиции 33
22. Принцип измерения дальности в РСБН. Структурная схема дальномерного канала 34
23. Принцип измерения азимута в РСБН. Структурная схема азимутального канала 37
24. Принцип работы индикаторного канала РСБН-4Н. Структурная схема индикаторного канала 39
25. Аппаратура ТУ-ТС РСБН-4Н: предназначение, технические характеристики, состав, принцип передачи команд 41
26. Аппаратура ТУ-ТС. Принцип проверки работоспособности РСБН-4Н 44
27. Предназначение и режимы работы ДРЛ-6М2 46
28. Тактические и технические характеристики ДРЛ-6М2. Тактические характеристики 47
29. Принцип действия ДРЛ-6М2 по обобщенной структурной схеме 49
30. Предназначение и принцип работы первичного канала ДРЛ-6М2 в режиме ПАСС 50
31. Предназначение и принцип работы первичного канала ДРЛ-6М2 в режиме СДЦ 52
32. Предназначение и принцип работы первичного канала ДРЛ-6М2 в режиме ПАРН 53
33. Предназначение и принцип работы первичного канала ДРЛ-6М2 в режиме СОВМ 53
34. Предназначение и принцип работы вторичного канала ДРЛ-6М2 в режиме АКТ 54
35. Предназначение, принцип работы и основные характеристики устройства синхронизации ДРЛ-6М2 55
36. Предназначение, принцип работы, основные характеристики передающего устройства первичного канала ДРЛ-6М2 57
37. Предназначение, принцип работы и характеристики приемного устройства первичного канала ДРЛ-6М2 58
38. Предназначение, принцип работы и характеристики устройства подавления активных помех ДРЛ-6М2 60
39. Предназначение, принцип работы и характеристики устройства подавления пассивных помех (устройства СДЦ) ДРЛ-6М2 62
40. Предназначение, принцип работы и характеристики устройства отображения видеосигналов первичного канала ДРЛ-6М2 64
41. Предназначение, принцип работы и характеристики передающего устройства вторичного канала 67
42. Предназначение, принцип работы и характеристики приемного устройства вторичного канала 68
43. Предназначение, принцип работы и характеристики УДОС 70
44. Предназначение, принцип работы и характеристики устройства отображения видеосигналов вторичного канала ДРЛ-6М2 71
45. Тактические и технические характеристики ПРЛ-6М2 72
46. Предназначение и принцип действия ПРЛ-6М2 по структурной схеме 73
47. Предназначение, принцип работы и характеристики ПРЛ-6М2 в режимах ПАСС и АКТ 74
48. Предназначение, принцип работы и характеристики ПРЛ-6М2 в режимах СДЦ и СОВМ 76
49. Предназначение, принцип работы и характеристики устройства синхронизации и передающего устройства ПРЛ-6М2 77
50. Предназначение, принцип работы и характеристики антенно-волноводного устройства ПРЛ-6М2 79
51. Предназначение, принцип работы и характеристики приемного устройства первичного канала ПРЛ-6М2 80
52. Предназначение, принцип работы и характеристики устройства подавления активных помех ПРЛ-6М2 81
53. Предназначение, принцип работы и характеристики устройства подавления пассивных помех (устройства СДЦ) ПРЛ-6М2 83
54. Предназначение, принцип работы и характеристики устройства отображения видеосигналов курсового и глиссадного каналов ПРЛ-6М2 84
Классификация радиотехнических средств навигации
по типу определяемого навигационного параметра;
угломерные (пеленгационные)
дальномерные
разностно-дальномерные
измерители линейных линейных (радиальных) и угловых скоростей
комбинированные (позволяющие совместно определять различные навигационные параметры)
по типу измеряемого РНП;
фазовые
амплитудные
частотные
временные
комбинированные
по назначению, подразделяют на системы;
посадки
навигации (трассовой и в приаэродромной зоне)
средства, используемые в комплексах УВД
по дальности действия;
глобальные (неограниченной дальности действия, позволяющие определять место ЛА в любой точке земного шара или в околоземном пространстве)
дальней навигации (для полетов ЛА на расстояние до 2500...3000 км или от 1500 до 14000 км от радионавигационных точек (РНТ), относительно которых определяются пространственно-временные координаты ЛА;)
ближней навигации (для полетов ЛА на расстояние до 350...450 км от РНТ.)
по способу определения МПЛА.
Линий положения (угломерные, дальномерные, разностно-дальномерные и их комбинации);
Счисления пути (прежде всего инерциально-доплеровские и воздушно-доплеровские)
Обзорно-сравнительный (радиотепловые устройства, РЛС обзора земной поверхности, корреляционно-экстремальные)
По характеру излучения
Непрерывное
импульсное
По степени автономности
Автономная
неавтономная
По степени автоматизации
Автоматизированная
Полуавтоматизированная
неавтоматизированная
По способу индикации
Визуальный (стрелочный прибор, цифровое табло, электронно-лучевая трубка)
Слуховой
В табл. приведены навигационные и информативные параметры сигналов наиболее распространенных РТСН
Определяемый Навигационный параметр |
Информативный параметр сигнала (РНП) |
Тип РТСН по определяемому навигационному параметру |
|||
Ампли- туда |
Частота |
Фазовый сдвиг |
Время запаздывания |
||
Азимут |
+ |
+ |
+ |
+ |
Угломерные |
Угол места |
+ |
+ |
|
+ |
|
Дальность |
|
|
+ |
+ |
Дальномерные |
Высота |
|
+ |
|
+ |
|
Разность расстояний |
|
|
+ |
+ |
Разностно-дальномерные |
Скорость |
|
+ |
|
|
Измерители скорости |
Навигационные системы определения координат: местные и глобальные
Местные системы координат, начало которых связывается с Землей, используются в качестве систем отсчета при сравнительно небольших перемещениях, когда поверхность Земли можно считать плоской. По своей форме они могут быть прямоугольными, цилиндрическими и сферическими. Такие системы координат находят широкое применение при счислении пути на расстояния десятков и сотен км (£_1000 км), при управлении ЛА в период взлета и посадки, при определении местоположения относительно ориентиров, целей, промежуточных пунктов маршрута (ППМ) и т.п.
Одну из осей местной горизонтальной системы координат обычно совмещают с северным направлением С (Х) меридиана, проходящего через радионавигационную точку (РНТ), в которой установлена наземная радионавигационная аппаратура; ось OY (рис.2) направляют по местной вертикали, а ось OZ проводят в горизонтальной плоскости перпендикулярно осям OY и OC (Х) таким образом, чтобы образовалась правая ортогональная система координат.
Место ЛА определяются:
в сферической системе координат дальностью Д, азимутом и углом возвышения (места) bb
в прямоугольной системе - координатами x, y, z.
в цилиндрической системе положение точки М определяется координатами дальностью Д, азимутом , у (высотой полета Н).
Глобальные системы координат жестко связаны с Землей и применяются для навигации, охватывающей всю или значительную часть земной поверхности. Наиболее распространенными глобальными системами координат являются: географическая (или геодезическая), геоцентрическая (геосферическая), а также левая и правая ортодромические системы координат.
В географической (геодезической) системе
координат ОгXгYг
(рис.4), применяемой для решения задач
воздушной навигации, за поверхность
Земли принимают поверхность эллипсоида
вращения.
географической (геодезической) системе
координат ОгXгYг
(рис.4), применяемой для решения задач
воздушной навигации, за поверхность
Земли принимают поверхность эллипсоида
вращения.

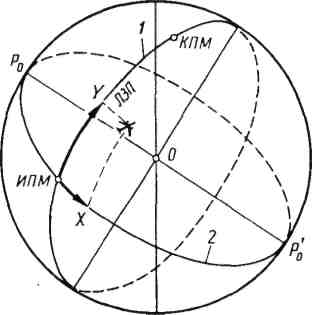
Система координат ОгцХгцYгц, в которой Земля представляется в виде шара, называется геоцентрической (геосферической). Отсчет геоцентрической широты (jj) производится между плоскостью экватора и направлением радиуса - вектора.
Ортодромическая система. Она широко используется в современных устройствах счисления пути. Координатная сетка этой системы строится на шаре. Основными точками системы являются полюсы, которые могут занимать на шаре различное положение в зависимости от направления воздушной трассы (маршрута). Основными осями координат являются две окружности большого круга — ортодромии, что и определило название системы. Одна ортодромия принимается за условный экватор и совмещается с ЛЗП или с осью маршрута (рис. 6). Эту ортодромию называют главной и принимают за ось Y, вторую ортодромию — за условный меридиан 2.