

30.Передаточная функция разомкнутой системы.
Рассмотрим сначала основной случай - отрицательную обратную связь.
На рисунке 3. изображена структурная схема замкнутой системы автоматического управления в наиболее общем виде, где G(р) и Z(р) - передаточные функции соответственно прямой цепи системы и цепи обратной связи. Сигнал обратной связи Хo.с(р) вычитается из входного сигнала Хвх(р) (в случае положительной обратной связи они не вычитаются, а складываются). Передаточные функции G(р) и Z(р) могут соответствовать как простым звеньям направленного действия, так и их любым комбинациям.
Рисунок 3 - Параллельное встречное включение звеньев, направленного действия (обратная связь)
Для схемы, изображенной на рисунке 3
Исключив из них промежуточную величину Хо.с, получим передаточную функцию замкнутой системы
(5)
Где (6)
есть передаточная функция разомкнутой системы. Смысл последнего названия становится понятным, если мысленно разомкнуть контур управления в любом месте и, «выпрямив» его, рассматривать прохождение сигнала, поданного в месте размыкания, по цепочке последовательно включенных звеньев направленного действия.
31.Передаточная функция замкнутой системы по входному воздействию.
Рассмотрим сначала основной случай - отрицательную обратную связь.
На рисунке 3. изображена структурная схема замкнутой системы автоматического управления в наиболее общем виде, где G(р) и Z(р) - передаточные функции соответственно прямой цепи системы и цепи обратной связи. Сигнал обратной связи Хo.с(р) вычитается из входного сигнала Хвх(р) (в случае положительной обратной связи они не вычитаются, а складываются). Передаточные функции G(р) и Z(р) могут соответствовать как простым звеньям направленного действия, так и их любым комбинациям.
Рисунок 3 - Параллельное встречное включение звеньев, направленного действия (обратная связь)
Для схемы, изображенной на рисунке 3
Исключив из них промежуточную величину Хо.с, получим передаточную функцию замкнутой системы
(5)
Итак, передаточная функция замкнутой системы автоматического управления равняется отношению передаточной функции прямой цепи к увеличенной на единицу передаточной функции разомкнутой системы.
Следует отметить, что этот вывод, равно как и формула (5), справедливы только для изображенного на рисунке 3 случая, когда внешнее воздействие поступает на вход системы управления. Поэтому Ф(р) иногда называют передаточной функцией замкнутой системы по входному воздействию.
32.Структурные схемы сар напряжения генератора постоянного тока.
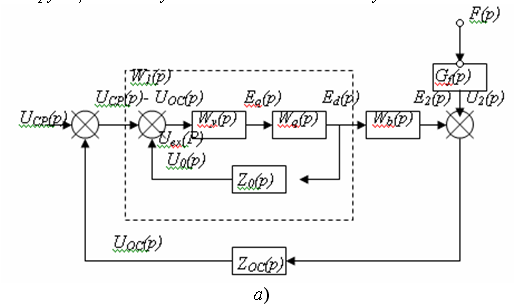
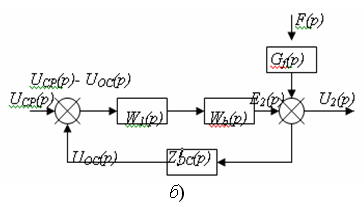
Рисунок 1 - Структурные схемы САР напряжения генератора постоянного тока, а – первоначальная, б – преобразованная.
Преобразование многоконтурных структурных схем с перекрещивающимися связями производят по способу переключения (перенесения) связей, сущность которого поясняется на примере, рисунок 1.
33. Преобразование Лапласа в применении к теории автоматического регулирования
При исследовании и расчетах систем автоматики широко используется математический метод - преобразование Лапласа.
Основанием для этого служит то обстоятельство, что такое преобразование существенно облегчает исследование сложных систем, заменяя дифференциальные уравнения алгебраическими. В частности, при решении дифференциальных уравнений систем преобразование Лапласа позволяет легко учитывать начальные условия и избежать сложных выкладок, связанных с вычислением постоянных интегрирования. Достаточно просто решаются также неоднородные уравнения, позволяющие учитывать влияние возмущений (записанных в правой части уравнения) на динамику процессов. Некоторые понятия, касающиеся обычного преобразования Лапласа и используемые при исследовании систем автоматики, приводятся ниже, а также в последующих главах.
Преобразование Лапласа преобразует функцию вещественного переменного (в том числе времени) в функцию комплексного переменного. Такое преобразование превращает дифференциальные уравнения в алгебраические, что дает определенные преимущества при решении ряда задач.
Распространенное в теории САР понятие так называемой передаточной функции также использует понятие лапласова изображения.
Общее представление о прямом и обратном преобразованиях Лапласа. Если имеется некоторая функция ƒ(t) независимой вещественной переменной t (обычно времени), то преобразование Лапласа, производимое над функцией ƒ(t) и обращающее ее в функцию F(р), определяется соотношением
(1)
здесь р - произвольная комплексная величина, обозначаемая , где σ и ω - вещественные переменные.
Функциональное преобразование вида (1), осуществляемое над функцией ƒ(t), часто сокращенно обозначается так (2)
Функция ƒ(t) называется оригиналом, а функция F(р) - изображением функции ƒ(t).
Следует заметить, что при применении преобразования Лапласа к функции ƒ(t) рассматриваются значения этой функции лишь при t>0, т. е. в технических задачах после приложения к системе внешних возмущающих воздействий, а именно это и представляет практический интерес при решении задач автоматического регулирования.
Для того чтобы преобразованная функция была определена, достаточно потребовать, чтобы интеграл (5.1) существовал для некоторой области р, за пределами которой этот интеграл может и не иметь смысла. Так, например, изображение оригинала, равного единице, т. е. если ƒ(t) = [1], будет равно Здесь при вычислении интеграла предполагается, что вещественная часть р положительна (σ>0). При σ≤0 интеграл не существует, но преобразованная функция от единицы всегда равняется 1/р.
Может случиться, что интеграл (5.1) не существует ни при каких значениях р. В этом случае преобразование (2) невозможно. Однако в физических задачах, описываемых дифференциальными уравнениями в полных производных с постоянными коэффициентами, и при обычном типе возмущающих воздействий это преобразование всегда осуществимо.
Наряду с прямым преобразованием (1) функции времени ƒ(t) в F(р), т. е. наряду с операцией перехода от функции вещественного переменного t к функции комплексного переменного р, пользуются обратным преобразованием, т. е. преобразованием изображения в оригинал. При этом производится обратная операция определения оригинала ƒ(t) по заданному изображению F(р). Эта операция обозначается символом L-1 или 1/L. Таким образом, в этом случае имеем (3) При этом преобразовании теорема о начальном значении функции ƒ(t) записывается так а теорема о конечном значении
Нахождение лапласова изображения для линейного дифференциального уравнения. Положим, что линейная система автоматического регулирования описывается дифференциальным уравнением n-го порядка с постоянными коэффициентами следующего вида (4)
Умножая левую и правую части уравнения (4) на е-pt и интегрируя в пределах от 0 до ∞, получим
Воспользовавшись вышеприведенными обозначениями, правилами о преобразованиях Лапласа, можно написать Полагая, что система находится при нулевых начальных условиях и зная лапласово изображение для производных, для данного случая получим (5)
Или
(6)
Выражение (6) является лапласовым изображением дифференциального уравнения (4) при нулевых начальных условиях.