

25. Основные способы включения звеньев сау.
Рассмотрим основные случаи включения звеньев направленного действия.
Последовательное включение (одноконтурная разомкнутая система). Структурная схема приведена на рисунке 1.
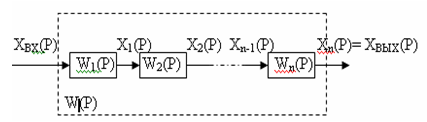
Рисунок 1 - Последовательное включение звеньев
направленного действия
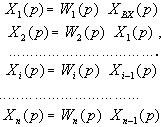
Для каждого из п звеньев можно записать
 (1)
(1)
Исключая все промежуточные величины, т. е. подставляя предыдущие в последующие, получим выражение для последнего члена
![]()
Учитывая, что выход последнего n-го звена является одновременно выходной величиной системы, т. е.
![]() получим
получим
![]() (2)
(2)
Так
как отношение
![]() по определению есть передаточная функция
всей системы то окончательно будем
иметь
по определению есть передаточная функция
всей системы то окончательно будем
иметь
![]() (3)
(3)
Итак, передаточная функция последовательно включенных звеньев равняется произведению передаточных функций отдельных звеньев.
Параллельное, согласное включение. Параллельным согласным включением звеньев направленного действия считается такое, при котором входная величина системы подается параллельно на входы всех звеньев, а их выходные величины алгебраически суммируются на выходе системы. На рисунке 2 изображен частный случай параллельного согласного включения трех звеньев направленного действия.
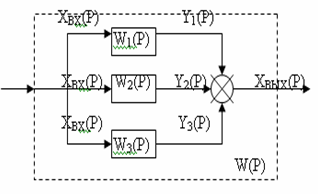
Рисунок 2 - Параллельное согласное включение
звеньев направленного действия
На основании формулы (2) для каждого из п параллельно, включенных звеньев можно записать
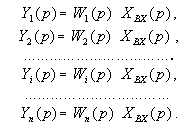
Суммируя написанные равенства и принимая во внимание, что по определению параллельного согласного включения, звеньев направленного действия сумма левых частей является выходной величиной системы, получим
![]()
Согласно определению передаточной функции (1), из последнего выражения будем иметь
![]() (4)
(4)
Таким образом, передаточная функция параллельных согласно включенных звеньев направленного действия равняется алгебраической сумме передаточных функций отдельных звеньев.
Параллельное встречное включение (обратная связь). Рассмотрим сначала основной случай - отрицательную обратную связь.
На рисунке 3. изображена структурная схема замкнутой системы автоматического управления в наиболее общем виде, где G(р) и Z(р) - передаточные функции соответственно прямой цепи системы и цепи обратной связи. Сигнал обратной связи Хo.с(р) вычитается из входного сигнала Хвх(р) (в случае положительной обратной связи они не вычитаются, а складываются). Передаточные функции G(р) и Z(р) могут соответствовать как простым звеньям направленного действия, так и их любым комбинациям.
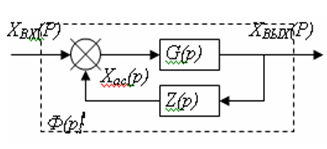
Рисунок 3 - Параллельное встречное включение звеньев, направленного действия (обратная связь)
Для схемы, изображенной на рисунке 3
![]()
Исключив из них промежуточную величину Хо.с, получим передаточную функцию замкнутой системы
![]() (5)
(5)
Где
![]() (6)
(6)
есть передаточная функция разомкнутой системы. Смысл последнего названия становится понятным, если мысленно разомкнуть контур управления в любом месте и, «выпрямив» его, рассматривать прохождение сигнала, поданного в месте размыкания, по цепочке последовательно включенных звеньев направленного действия.
Итак, передаточная функция замкнутой системы автоматического управления равняется отношению передаточной функции прямой цепи к увеличенной на единицу передаточной функции разомкнутой системы.
Следует отметить, что этот вывод, равно как и формула (5), справедливы только для изображенного на рисунке 3 случая, когда внешнее воздействие поступает на вход системы управления. Поэтому Ф(р) иногда называют передаточной функцией замкнутой системы по входному воздействию.