

1.Функциональные схемы систем автоматического управления
Любой технологический процесс, протекающий в какой-либо установке, машине, двигателе, т. е. в самых разнообразных объектах, можно характеризовать одним или несколькими показателями процесса. Такими показателями могут быть самые различные физические, химические и другие величины. Такие показатели процесса называют также параметрами процесса (координатами процесса, величинами процесса).
Обеспечение всего комплекса возможных операций по управлению объектом без участия обслуживающего персонала выполняется системой автоматического управления (САУ). Обеспечение же только требуемых значений параметров, определяющих желаемый ход технологического процесса в том или ином объекте без участия человека, осуществляется устройством автоматического регулирования.
Параметры объекта, которые подлежат изменению или стабилизации, принято называть регулируемыми параметрами, а объект, в котором регулируются такие параметры, называют объектом регулирования.
Сказанное выше можно также сформулировать так: устройства, предназначенные для автоматического поддержания постоянного значения регулируемых параметров в разнообразных объектах или изменяющие регулируемые параметры по какому-либо требуемому закону, называют автоматическими регуляторами. Сочетание объекта регулирования с автоматическим регулятором принято называть системой автоматического регулирования (САР), которая является частным случаем САУ. Любую систему регулирования можно разложить на ряд элементов.
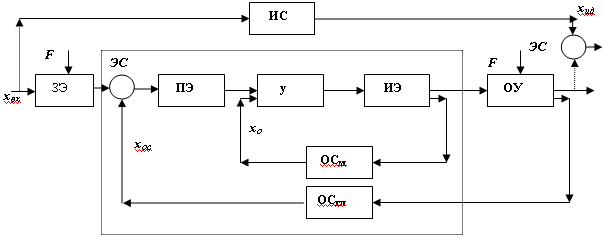
Рисунок 1.1 - Общая функциональная схема САУ
Как видно из схемы (рисунок 1.1), на объект управления ОУ (называемый также объектом регулирования ОР), находящийся под влиянием внешнего возмущающего воздействия F, поступает регулирующее воздействие хр, являющееся выходной величиной управляющей части системы (регулятора), которая представляет собой совокупность обведенных пунктиром элементов, специально введенных для получения замкнутой системы автоматического управления (регулирования).
Замыкание контура управления производится подачей в регулятор по цепи главной обратной связи ОСГЛ управляемой величины, которая в общем случае может отличаться от выходной величины объекта управления, если последняя недоступна для прямого контроля (например, измерение тока якоря электродвигателя вместо непосредственного контролирования вращающего момента, противо-э.д.с. вместо скорости вращения якоря и т.д.). При этом ошибка системы определяется разностью между действительной выходной величиной хвых и ее «идеальным» значением хк%, представляющим собой выход некоторой воображаемой «идеальной» системы ИС, осуществляющей точное заданное преобразование входной величины. Необходимость введения задающего элемента ЗЭ объясняется тем, что задающее воздействие, непосредственно поступающее на элемент сравнения ЭС, может отличаться от входной величины по двум причинам:
а) эти воздействия могут быть связаны друг с другом определенной функциональной зависимостью * или просто различаться масштабом величин;
б) задающее воздействие часто содержит в себе, наряду с полезным входным сигналом, и случайные возмущения или помеху (шум).
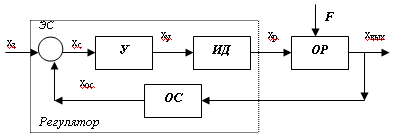
Рисунок 1.2 - Функциональная схема простейшей системы автоматического регулирования
Сигнал ошибки хс, представляющий собой разность задающего воздействия хз и сигнала главной обратной связи хо.с, в общем случае не должен отождествляться с ошибкой ∆х, даже если выходная величина совпадает с управляемой, а задающее воздействие — с входной величиной. Так, в статической системе при отсутствии возмущающих воздействий и неизменных параметрах системы установившаяся ошибка равна нулю, при этом сигнал ошибки должен иметь отличную от нуля величину, необходимую для поддержания заданного значения выходной величины системы.
Усилительный элемент У и исполнительный элемент ИЭ входят в основной контур системы. Преобразующий элемент ПЭ и элемент местной обратной связи ОСм вводятся в систему для придания ей лучших динамических свойств, т. е. для коррекции системы, в связи с чем их называют соответственно последовательным и параллельным корректирующими элементами. Их наличие не является обязательным. Однако в этом случае могут быть осуществлены лишь простейшие САУ с крайне низкими качественными показателями.
![]()
Рисунок 1.3 – Функциональная схема простейшей следящей системы
На рисунке 1.2 и 1.3 изображены соответственно функциональные схемы простейшей замкнутой САР и простейшей следящей системы. Особенностью этих схем является то, что все изображенные на них элементы являются необходимыми. Отсутствие какого-либо из них делает невозможным существование замкнутой системы автоматического управления. В обеих системах предполагается возможность непосредственного контролирования выходной величины (которая совпадает с управляемой или регулируемой величиной) и совпадение задающего воздействия с входом системы. На практике это имеет место тогда, когда существует твердая уверенность в том, что указанные пары величин связаны между собой жесткой зависимостью (обычно пропорциональной).
Особенностью следящих систем, предназначенных для отработки (отслеживания) механических перемещений, является, как правило, высокая точность передачи сигнала по цепи главной обратной связи ОСГЛ от выхода системы к элементу сравнения ЭС. При этом в установившемся режиме выходная величина θвых должна с очень малой (по сравнению с переходным режимом) погрешностью совпадать с входной величиной θвх*. Вследствие этого элемент главной обратной связи производит передачу сигнала к элементу сравнения с коэффициентом, равным единице, и может быть заменен на функциональной схеме одной линией (рисунок 1.3). При этом ошибка следящей системы θ = θвх - θвых.