

2.7Визначення стійкості котка
Основною характеристикою стійкості котка є граничний кут поперечного крана, при якому коток може стояти, не перекидаючись і не зсковзуючись донизу.
Перекидання котка можливе навкруги осей О1О2 та ОО3 (рис. 31). Осі О1О2 поєднують бічні колеса передньої і задньої осі. Осі ОО3 поєднують шарніри підвіски переднього і задніх мостів котка.
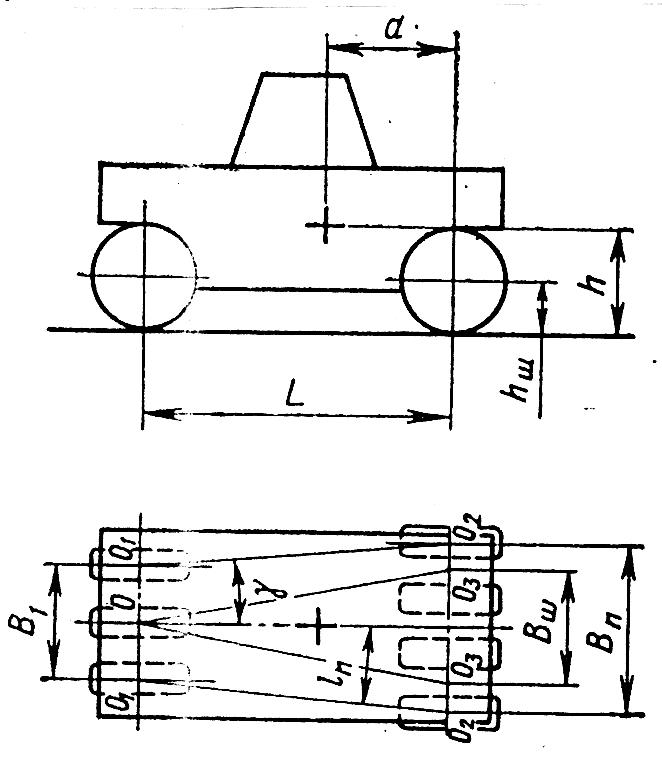
Рис. 31 Схема пневмоколісного самохідного котка до розрахунку поперечної стійкості
Граничний статичний кут поперечного ухилу визначають з відношення
![]() ,
,
звідки

де lП – плече стійкості;
h – висота центра тяжіння котка.
Вісі перекидання О1О2 та ОО3 розташовуються відповідно на відстані h і hш від центра тяжіння. Звичайно hшскладає не більше 0,5 h. Тому граничний кут перекидання відповідно осі ОО3 істотно більше кута перекидання відповідно осі О1О2.
Плече стійкості виражається формулою
 ,
,
тоді
![]() м.
м.
Граничні кути поперечної стійкості котків складають 24 - 34º.
Статичний кут поперечного ухилу βφ, на якому можливе сковзання котка визначається з виразу: tg βφ = φ, де φ – коефіцієнт зчеплення шин з матеріалом. tg βφ = 0,89.
3Гідравлічний розрахунок
3.1.1Вибір гідромоторів пересування
Оскільки гідромотори встановлюються безпосередньо на ведучих колесах та між гідромотором і колесами встановлюється тільки простий редуктор, розраховуємо потужність гідромотора необхідну для транспортного та робочого пересування.
При двох блоках ведучих коліс потужність приводу одного блока буде рівна половині потужності приводу котка:
![]() .
.
При транспортному пересуванні потужність гідромотора рівна
![]() ,
,
тоді
![]() кВт,
кВт,
де Ν2 – потужність, необхідна для транспортного режиму (див. розд. 2.2.2).
При робочому пересуванні
![]() ,
,
звідки
![]() кВт.
кВт.
Для приводу пересування вибираємо аксіально-поршневий гідродвигун 210.20, у якого робочий об’єм V0 = 54,8 см3; номінальний крутний момент М = 208 Н·м; потужність N = 36 кВт; номінальний тиск Р = 25 МПа; номінальна частота обертання nн = 1500 об/хв., максимальна - nmax = 2240 об/хв.; ККД y = 0,85; маса гідромотора – 28 кг.
Для визначення передаточного числа редуктора знайдемо частоту обертання гідромотора, при якій він розвиває необхідну для подолання максимального сумарного опору потужність. Враховуючи, що максимальний опір в процесі роботи котка зустрічається рідко, то визначення частоти обертання виконуємо при максимальному тиску в гідросистемі. Тоді
![]() ,
,
де Рmax – максимальний тиск в системі, МПа;
V0 – робочий об’єм гідромотора, м3;
η – загальний ККД, η = 0,85;
η0 – обємний ККД, η0 = 0,96.
![]() Н·м.
Н·м.
Частота обертання при цьому:
![]() ,
,
де N – потрібна потужність, Вт;
ηр – ККД редуктора, ηр = 0,95.
![]() об/хв.
об/хв.
Визначимо передаточне число редуктора за формулою:
![]() ,
,
де D – діаметр колеса, м;
n – частота обертання колеса, об/хв.;
V – робоча швидкість котка, м/с;
t – час, t = 60 с.
![]() .
.
Сила тяги на колесі:
![]() ,
,
де UТР – передаточне відношення, UТР = і;
ηтр – ККД трансмісії, ηтр = ηр;
ηв – радіус колеса, м.
![]() Н.
Н.
Визначимо максимальну швидкість котка за формулою при nmax:
![]() ,
,
тоді
![]() м/с
= 14,5 км/год.
м/с
= 14,5 км/год.
При транспортному і робочому русі котка визначимо витрату рідини гідромотором за формулою:
![]() .
.
При робочому русі котка:
![]() см3/с
= 1,71 л/с.
см3/с
= 1,71 л/с.
При транспортному русі котка:
![]() см3/с = 2,13 л/с.
см3/с = 2,13 л/с.
Для двох гідромоторів витрата рідини при робочих рухах котка рівний 3,42 л/с; при транспортному пересування максимальна витрата рідини складає 4,26 л/с.