

4. Аппаратурная реализация системы управления Выбор ро совместно с исполнительным механизмом для поступающего расхода.
Вычислим условную пропускную способность клапана расхода 2·Qп0 согласно DIN EN 60534.

По каталогам ЗАО «АРМАГУС» выбираем регулирующий односедельный фланцевый клапан «25ч943нж» с DN = 15 мм, Cv = 0,25 м3/ч.
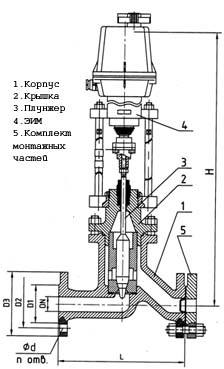
Рис. 7. Клапан типа 25ч943нж.
Индицирование степени открытия РО производится дистанционным указателем положения (ДУП). Показания ДУП для мин/макс состояний штока могут быть подстроены от (0..100)%. Электрическое питание ДУП – однофазная сеть переменного тока 220В. Производитель: ОАО «МЗТА».
Выбор ро совместно с исполнительным механизмом для отходящего расхода.
Перепад давления в данном случае определяется давлением столба жидкости на уровне РО. При максимальном уровне воды 10 м ΔP = 0,98 бар. Величина условной пропускной способности

Расход Q0 принимаем в 2 раза больше номинального, поэтому выбираем клапан с Cv = 0,202 м3/ч марки «25ч943нж» с DN = 15 мм, Cv = 0,25 м3/ч в комплекте с ЭИМ постоянной скорости, реостатным датчиком перемещения штока и ДУП.
Выбор датчика уровня.
При максимальном наливе воды 10 м гидростатическое давление на дно составляет 100 кПа. По каталогу фирмы «МЕТРАН» выбираем датчик типа «Метран 100-ДГ», модель 1541 с верхним пределом измерения 100 кПа, Pизб = 0,4 МПа.
Принцип действия датчика основан на эффекте преобразования деформации мембраны при воздействии на нее измеряемого давления, пропорционального высоте столба. Выбираем датчик с условным кодом МП, выдающий аналоговый цифровой сигнал (4–20) мА.
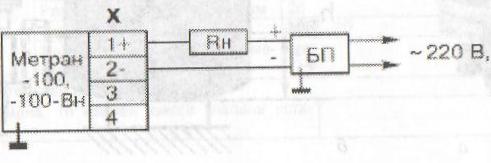
Рис. 8. Схема внешних электрических соединений датчика «Метран-100ДГ». (X-клемма; Rн- сопротивление нагрузки; БП- источник питания 26В)
Автоматический регулятор.
Общепромышленный регулятор МИНИТЕРМ 400.04 производства ОАО МЗТА с ПИ законом регулирования.
Технические характеристики регулятора:
1. напряжение питания (24±6) В постоянного тока;
2. потребляемая мощность не более 3,6 Вт.
3. основная погрешность измерения для сигналов 4–20 мА, 0–50 мВ не более 0,25%
В рамках настоящего проекта законы регулирования в МИНИТЕРМ-400 реализуются по 2 каналам:
а)
аналоговый вход
![]() и аналоговый выход
и аналоговый выход
![]() в виде стандартных сигналов (4–20) мА.
Передаточная функция регулятора
в виде стандартных сигналов (4–20) мА.
Передаточная функция регулятора
![]()
б) аналоговый вход , а выходной переменной является линейное перемещение элемента ЭИМ, преобразованное из вращательного движения выходного вала электродвигателя.
ПИ-закон регулирования: а) интегральная часть обеспечивается электродвигателем ЭИМ; б) пропорциональность перемещения выходного элемента ЭИМ входному аналоговому сигналу регулятора. В этом случае
![]()
где Kp [%/мА] – коэффициент передачи.
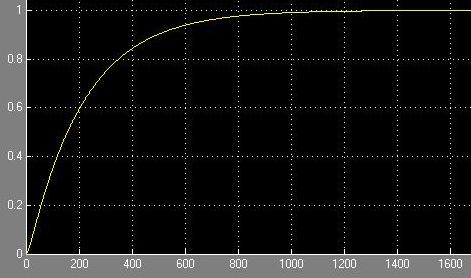
Рис. . Переходная характеристика замкнутой системы.
Время регулирования tр = 700 с.
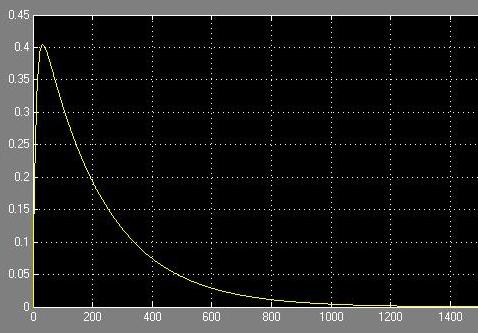
Рис. . Переходная характеристика замкнутой системы для возмущающего воздействия ΔQп = 0,1Qп0.
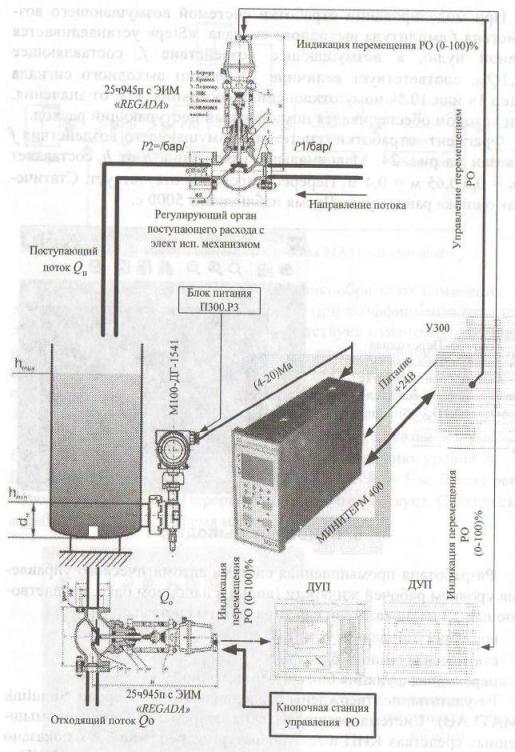
Рис. . Аппаратурное решение САУ.
5. Заключение
Разработанная система промышленного управления уровнем жидкости в емкости удовлетворяет заданию и обеспечивает:
- время регулирования tр = 700 с, которое соответствует значению динамической константы ОУ;
- нулевую статическую ошибку;
- монотонность переходной функции.
Результаты подтверждены моделированием в среде Simulink (MatLab). В аппаратурном решении системы предусмотрены современные средства КИП-А производства «АРМАГУС», REGADA, ОАО «МЗТА», ОАО «МЕТРАН».