

9) Автоматическое выравнивание и приземление.
Выравнивание начинается с высоты примерно 20 м.
Посадка с вертикальной скоростью 0,6 м/с. В настоящее время для режима автоматического снижения используется экспоненциальная траектория. В таком случае вертикальная скорость пропорциональна высоте.
Для реализации этой траектории необходимо измерить высоту с помощью радиовысотомера и сравнить эти сигналы с необходимыми параметрами. Разность заданных и текущих параметров будет являться основой для отклонения РВ. При такой траектории, вертикальная скорость при посадке равна 0, а точка касания оказывается неопределенной. Чтобы обеспечить потребную вертикальную скорость 0,6 м/с опускают касательную снижения ниже земли примерно на 3 м.
Для этого необходимо «обманывать» ВС и к высоте прибавлять 3м (10 футов).
Для увеличения быстродействия вводится сигнал разомкнутой системы программного управления. Она осуществляет программное отклонение РВ, которое обеспечивает экспоненциальную траекторию.
Система автоматизированного взлета
1. На первом этапе с помощью наземного компа определяются параметры нормального хода набора скорости по дистанции. max =Fx may=Fy
(m/y) * (d^2x/dt^2)= έP
c помощью этой системы уравнений находиться кривая торможений, при этом берутся начальные условия. Lo= Lвпп+Lкпб
t=-t
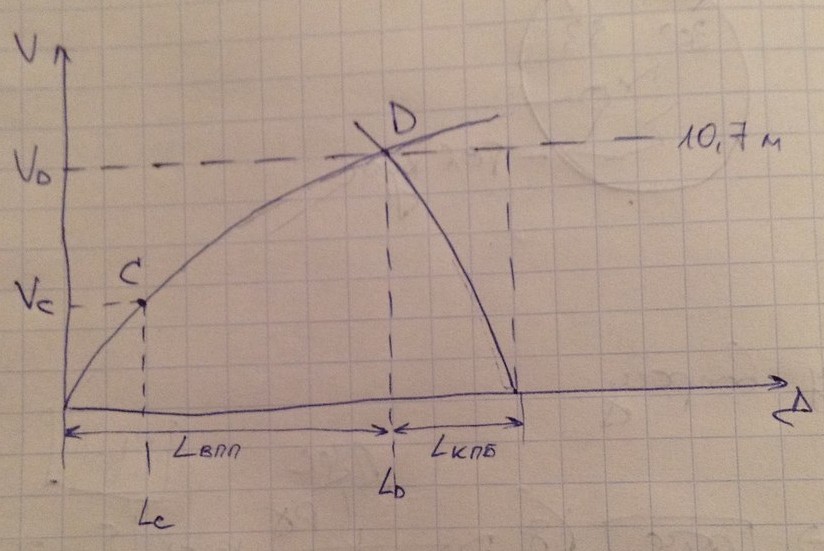
Применение кривых дает дистанцию с точкой Д, которая указывает дистанцию, где нельзя прекращать взлет.
Кроме того, учитывается условия когда происходит отказ двигателей. Если это происходит до точки Д — взлет прекращется. Если после точки — взлет прекращать ни-ни. Набор скорости при этом с точки Д будет происходит по другой кривой и в этих условиях в конце КПБ нужно обеспечить достаточную скорость, что бы высота была безопасной.
2е дифф уравнение дает возможность опре высоту. Если после решения достигается необходимая безопасная высота комп определяет взлетную массу, которая обеспечила бы безопсн взлет даже при ебанном отказее не менее ебанного двигателя.
Уравнение, включает параметры как самог ВС, так и парам впп и условий погоды. Из-за сложности решения этого уравнения во время разбега — участок от С до Д заменяется прямой, которая описывается уравнением: Vp=Vc + (Vd-Vc)/(Ld-Lc) * (L-Lc)
Для её вычисления во время разбега в бортовой вычислитель задаются: Vc, Vd, Ld, Lc, L. На 2м этапе разбега происходит измерения пройденной дист и текущей скорости для каждого момента времени. Проше всего они производятся с помощью инерциальной системы.
Начиная с точки «С» при данной измер дист, измеряетсся скорость и сравнивается с расчетной. Вычислитель, получая данные с инерциальной сис, если текущая скорость после точки «С» меньше расчетной выдается сообщение экипажу и сигнализации «взлет прекратить, сучки»
11) Система автоматического контроля и резервирования Нужна для повышения безопасности. Нужно более надежна чем человек. Помогает выявления отказов отдельных элементов и системы в целом. Автоматическое переключение на исправный режим работы. Резервирование работы отдельных элементов и систем. Определяет предполетную готовность оборудования
.
 Методы
детекции:
-Сравнение
контролируемого параметра с предельным
значением
-
сравнение контролируемого параметра
с аналоговой системы
- использования
кворум элементов (метод голосования)
Кворум
тоесть:
Если
идут два сигнала, с аналоговых систем,
и они разные то пилот сам должен выбрать
какая исправна, а если 3 то система сама
отключает неисправную систему.
Методы
детекции:
-Сравнение
контролируемого параметра с предельным
значением
-
сравнение контролируемого параметра
с аналоговой системы
- использования
кворум элементов (метод голосования)
Кворум
тоесть:
Если
идут два сигнала, с аналоговых систем,
и они разные то пилот сам должен выбрать
какая исправна, а если 3 то система сама
отключает неисправную систему.
Определения неисправности системы: А) неперрывный - служит для определения исправно сети элементов цепи. Иными словами, идет определенный сигнал, на отдельной от рабочего по частоте, по цепи, и система знает какой должен быть сигнал на выходе после каждого элемента, и если он другой то система знает какой элемент неисправен. Б) тест на решение задачи То же самое только идет несколько сигналов имитирующих сигнал датчиков. В) обегающий контроль Этот тест предусматривает последовательную проверку нескольких систем и элементов всего комплекса, производиться путем тестирования с решением задачи или единичным с помощью пост сигнала всех элементов входящих в комплекс.
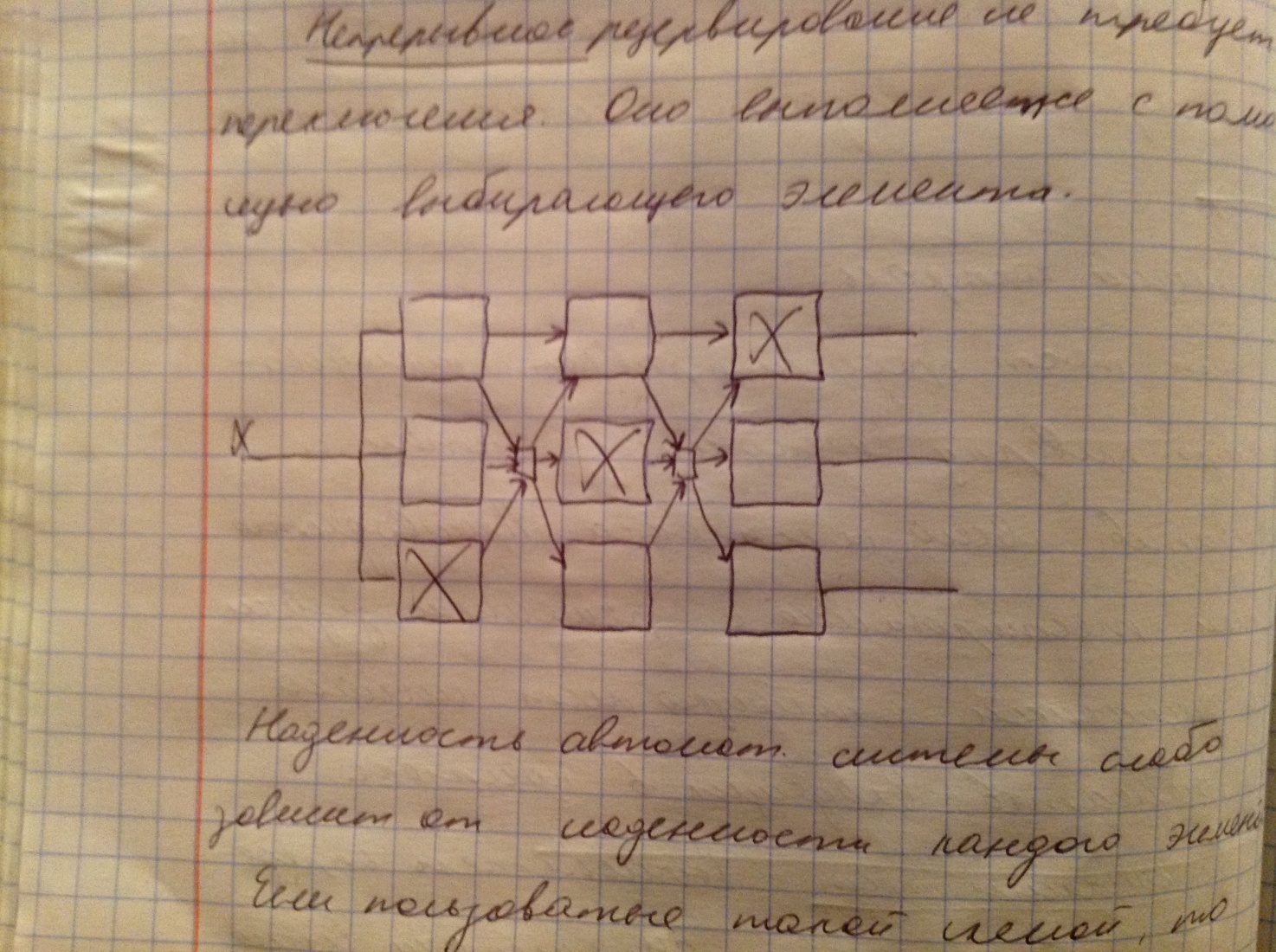
Стыковочный тест- Вычислетель определяет исправную работу ПУ и систему сигнализации. Резервирование : 1) замещением - требует время на переключение 2) непрерывное - Резервирование не требует переключение оно выполняется с помощью выбирающего элемента. Надежность автомат сист слабо зависит от надежности каждого элемента. Если пользоваться такой схемой то можно создавать системы с любой заданой надежностью.