

Автоматическое управление полетом по маршруту
И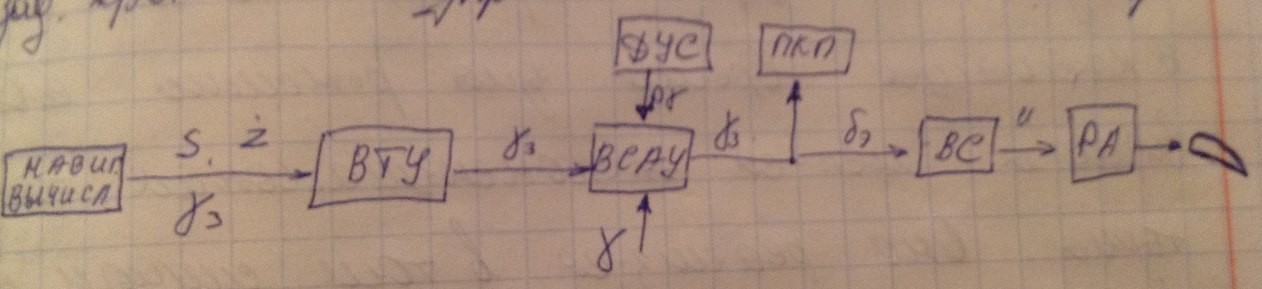 меет
несколько подрежимов.
меет
несколько подрежимов.
В этом режиме в каждый момент времени навигационный вычислитель выдает ортодромические координаты или заданный крен ВС.(S,Z,крен). На основании орт. Координат в нав вычислители или вычислители траекторного управления САУ вычисляется зад. Крен.
крен=F(k1Z+k2Z') — производная в законе управления
Во время движения по линии пути постоянно убирается боковое отклонении путем вычисления заданного крена и управления крена с помощью САУ.
Во втором режиме управление траектории производится по инф от VOR.
Автоматический заход на посадку
Начинается после завершения предпосадочного маневра и выхода в точку 4го разворота.
В вертикальной плоскости, в режиме захода на посадку работает 2 канала: Боковой и продольный.
Боковой канал – осуществляет разворот и совмещает вектор путевой скорости с осью ВПП.
Продольный канал – начинает работать позже в момент пересечения с глиссадой.
После,работают оба канала вместе и продолжает до ВПР.
В настоящее время наиболее распространенная посадка по ИЛС, которые включают наземные маяки(курсовой и глиссадный, маркерный).
Работа бокового канала – при подходе к точке 4го разворота проверяется вход в зону действия маяка по закрытию бленкера и загорается зеленая лампочка (на пульте Курс-МП)
При этом происходит переход от управления по навигационному комплексу к управлению от ИЛС. При нажатии кнопки курсовая зона: ВС автоматически начинает разворот при этом для управления используются два сигнала:
Угловое отклонение ВС от равносигнальной зоны курса. Этот сигнал поступает с Курс-МП и получается в результате оценки 2х лепестков.
Разница между курсом ВС и ЗПУвпп. Формируется в результате вычисления разницы, установленной на ПМП ЗПУ и текущим курсом.
Сигналы поступают в вычислитель САУ в котором определяется заданный крен в каждый момент времени согласно закону управления.
Сигнал углового отклонения
Производная сигнала углового отклонения(демпфирование колебаний)
Отклонение по курсу
Сигнал проходит через ограничения.
Представляет собой аналог двойной производной по ускорению.
Особенностью управления по угловому отклонению, является то, что при одном и том же отклонении от оси ВПП при приближении к торцу ВПП сигнал углового отклонения увеличивается.
Это значит, что при приближении к курсовому маяку увеличивается управляющий сигнал при том же линейном отклонении от оси. Это эквивалентно увеличению коэффициента усиления и снижению запаса устойчивости, поэтому во время захода на посадку при пролете маркерных маяков, дискретно уменьшается Кɛ и Кɛ(с точкой), а также ограничивает заданный крен до 10-15 градусов и затем до 3-5(для обеспечения устойчивости)
При пересечении глиссады автоматически происходит захват и начинает работать продольный канал. Работа продольного канала аналогична. Кроме того, в момент захвата глиссады выдается форсированный сигнал, отклонение руля высоты. В точке принятия решения заход на посадку заканчивается.
В одном случае – отключается АП,в другом – происходит автоматическое выравнивание и приземление.
Заход на посадку часто производят в директорный режим. В этом случае САУ работает также, как в автоматическом режиме, но пилот отключает рулевые машинки от управления. Кнопкой отключения АП и руководствуется индексами отклонения сигналов между креном и тангажом.