

Автопилоты, принцип действия, комплект, бла бла
Автопилот — устройство или программно-аппаратный комплекс, ведущий транспортное средство по определённой, заданной ему траектории.
Предназначен для:
Стабилизация ВС относительно центра масс по углу тангажа, крена, рыскания.
Стабилизация высоты
Автоматическое триммирование руля высоты.
Автопилот имеет 3 канала: РВ, РН, Элероны. Все три канала работают практически автономно (присутствуют перекрестные обратные связи) Каждый из каналов представляет собой замкнутую статическую САР с ошибкой стабилизации примерно 1 градус.
Закон управления в таком автопилоте выглядит так:

В состав автопилота входит:
- Пульт управления
- Агрегат управления
- Три рулевых машины
- Усилители рулевых машин
- ДУС
- КВ (корректор высоты)
Принцип работы основан на устранении отклонения заданных элементов от заданных значений.
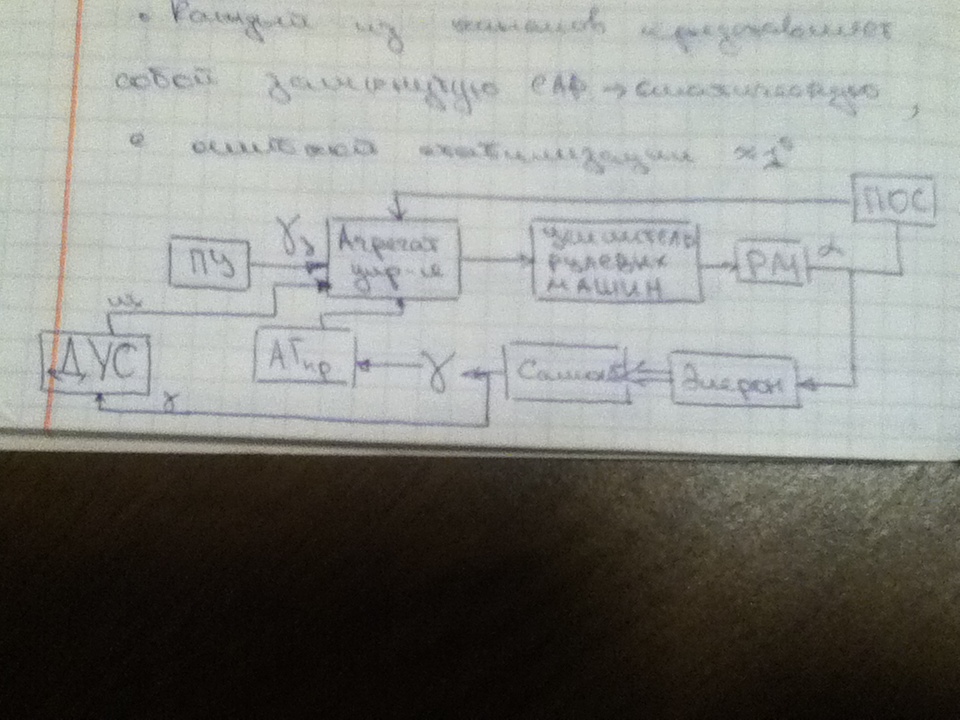
На примере канала крена:
В агрегат управления автопилота поступают сигналы от ДУС, АГ и пульта управления, а также от потенциометра обратной связи, который обеспечивает жесткую обратную связь. Агрегат управления выдает управляющий сигнал на УРМ, соответственно и на сами рулевые машины, которые воздействуют на элероны, которые, в свою очередь, создают кренящий момент для устранения отклонения текущего крена от заданного.
Эксплуатация автопилота
АП включается на высоте не ниже 300м. Через 10-100с после взлета (режим СОГЛАСОВАНИЯ) вкл лампочка ГОТОВ.
В этом режиме обнуляются управляющие сигналы.
Установив заданный курс и угол тангажа нажимаем ВКЛ АП, при этом лампочка ВКЛЮЧЕН горит.
УПРАВЛЕНИЕ С ПОМОЩЬЮ РУКОЯТКИ
При необходимости изменения курса необходимо установить рукоять РАЗВОРОТ изменяя заданное значение крена, контролируюя тек крен по авиагоризонта. Перед выходом на заданный курс рукоятку медленно ставят в нулевое положение, чтобы попасть чтко накурс.
На заданный ккурс можно осуществлять с помощью ЗК-2 установив на нем значение заданного екурса и перевежя переведя переключатель с положения ГИК-ГПК в РАЗВОРОТ. При этом разница между заданным и текущем курсом поступает в агрегат управления, в канал крена, отклоняя элероны на угол пропорциональный разнице курсов.
При необходимости изменения угла тангажа необходимо нажать на переключатель «СПУСК-ПОДЪЕМ»
При подходе к заданной высоте эшелон экипаж уменьшает верт скороть набора этой рукояткой. После этого включается режим стабилизации высоты — кнопка «КВ» и загорается лампа КВ. С этого момента любое отклонение от заданной высоты вызывает появление в КВ сигнала пропорционального разницы заданной и текущей высоты. Эта разница является основой для формирования отклонения РВ.
Перевод ВС на стабилизации высоты возможен также нажатием кнопики горизонт. При ее наж сигналы управления крена и тангожами откулбчаются и подключаются нулевые сигналы и ВС выходи из крена и тангажа и автоматически включается режим стабилизации частоты. АП не реагирует на перекл «СПУСК-ПОДБЕМ», поэтому 2 раза надо нажать «ПУСК»