

7. Проверочный расчет быстроходного вала
7.1. Определение реакций опор
Для проверочного расчета статической и усталостной прочности ступенчатого вала (быстроходного или тихоходного в соответствии с заданием) составим его расчетную схему (см. рис. 13).
Поскольку подшипники прямозубой передачи, воспринимают только поперечные нагрузки, то заменим их шарнирными неподвижными опорами RA и RB. Причем положение шарнирной опоры определим с учетом угла контакта а подшипника качения, определяемого конструкцией подшипников (см. рис. 14) Поскольку для всех вариантов цилиндрических прямозубых редукторов (см. рис. 3-5) заданных исполнений a = 0, то для их радиальных подшипников положение опор принимаем в середине ширины подшипников.
Геометрические параметры вала определим на основании чертежа редуктора с межосевым расстоянием aW = 200 мм (см. вариант 1) а = 125 мм; b = 75 мм; с = 75 мм.
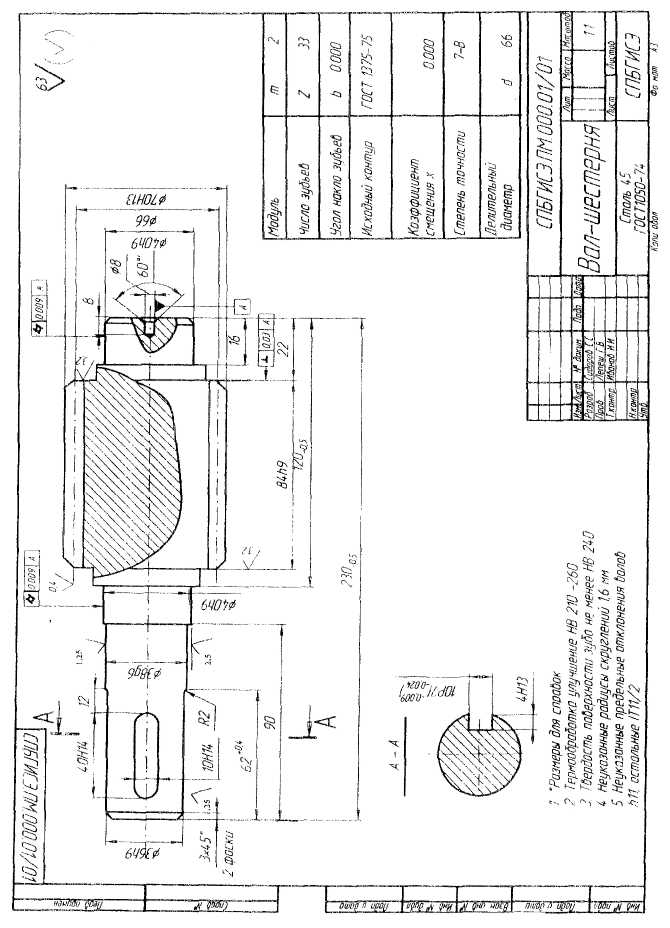
Рис. 12. Чертеж быстроходного вала
Рассмотрим внешние силы, нагружающие быстроходный вал редуктора (рис. 13).
Со стороны муфты от электродвигателя на вал действует крутящий момент T1 и поперечная сила Fr со стороны зацепления окружная сила FT и поперечная R0:

где: Ft – окружное усилие, действующее на зубья муфты
![]()
Принимаем Fr = 1041,7 Н.
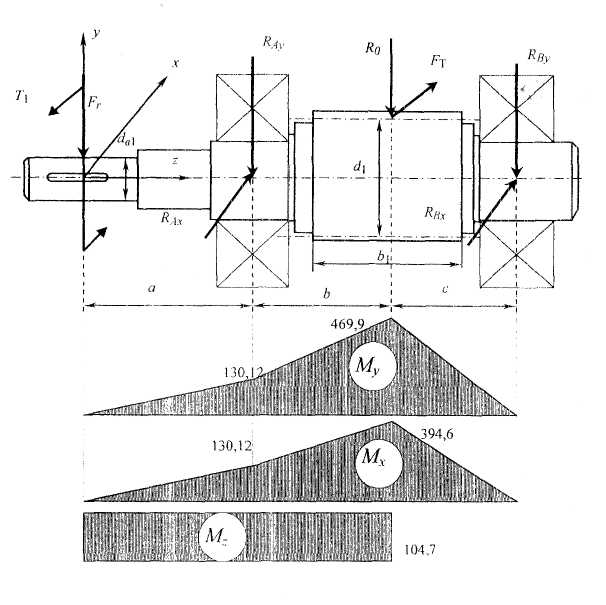
Рис. 13. Расчетная схема вала
Шариковые подшипники |
|||
|
|
|
|
Радиальные |
Сферические |
Радиально-упорные |
Упорные |
Роликовые подшипники |
|||
|
|
|
|
Радиальные |
Сферические |
Радиально-упорные |
Упорные |




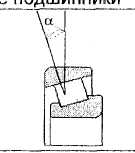
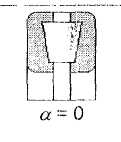
Рис. 14. Виды подшипников качения
Реакции опор RА и RВ рассчитаем из условий статики. Поскольку направленные силы Fr относительно плоскости действия составляющих реакций неизвестно, то в каждом случае будем добавлять ее абсолютное значение




В соответствии с найденными реакциями строим эпюры изгибающих Мх(z), My(z) и крутящих Mz(z) моментов (см. рис. 13):
На участке 0 ≤ z < а => Мx(z) = My(z) = – Fr ∙ z = 1041,7 ∙ z;
при z = 0 => Mx(z) = My(z) = 0; z = a => Mx(z) = …
… My(z) = 1041,7 ∙ 125 ∙ 10–3 = 130,2 H ∙ м;
На участке 0 ≤ z < а => Мx(z) = – Fr ∙ z = 1041,7 ∙ z;
при z = 0 => Mx(z) = 0;
при z = a => Mx(z) = 1041,7 ∙ 125 ∙ 10–3 = 130,2 H ∙ м;
На участке a ≤ z < а + b => Мx(z) = – Fr ∙ z = 1041,7 ∙ z – RAy ∙ (z – a);
при z = a + b => Mx(z) = 1041,7 ∙ 200 ∙ 10–3 + 2484 ∙ 75 ∙ 10–3 = 394,6 H ∙ м;
На участке 0 ≤ z < а => Мy(z) = – Fr ∙ z = 1041,7 ∙ z;
при z = 0 => My(z) = 0;
при z = a => My(z) = 1041,7 ∙ 125 ∙ 10–3 = 130,2 H ∙ м
На участке a ≤ z < а + b => My(z) = – Fr ∙ z = 1041,7 ∙ z – RAx ∙ (z – a);
при z = a + b => My(z) = 1041,7 ∙ 200 ∙ 10–3 + 3488 ∙ 75 ∙ 10–3 = 469,9 H ∙ м
На участке 0 ≤ z < а + b => Мz(z) = – T1 = – 104,17 ∙ z;
7.2. Расчет статической прочности вала
Из рис. 13 следует, что опасными сечениями для рассматриваемого вала, которые необходимо проверить на прочность, являются сечения: (z = 0), как наименее жесткое при кручении dв1 = 26,5 мм, а также сечения (z = a) и (z = a + b), где действуют наибольшие изгибающие моменты.
В сечении (z = 0) находится еще и шпоночный паз, ослабляющий его жесткость. Сечение (z = a), где; действует изгибающий момент
![]() .
.
и крутящий момент Mz = 104,17 Н ∙ м, находится в сложном напряженном состоянии и при этом имеет диаметр, незначительно превышающий наименьший. В сечении (z = a + b) изгибающий момент достигает наибольшей величины
![]() .
.
Рассчитаем наибольшие напряжения в опасных сечениях.
В сечении (z = 0) нормальные напряжения от осевых сил и изгибающих моментов равны нулю, касательные напряжения τmax определяются крутящим моментом Мz = 104,17 H ∙ м и полярным моментом сопротивления сечения Wp цилиндрического конца вала со шпоночным пазом, глубиной t = 5 мм (см. табл. 8).
![]() .
.
Тогда наибольшие касательные напряжения:
![]() ,
,
а условие прочности вала в сечении (z = 0)
![]()
выполняется.
В сечении (z = a) наибольшие нормальные напряжения определяются величиной изгибающего момента Ма = 183,8 Н ∙ м и моментом сопротивления сечения вала

о
наибольшие касательные напряжения
этого сечения с полярным моментом
![]() ,
равны
,
равны
![]() .
.
В качестве допустимых напряжений на изгиб примем
![]() .
.
При этом условие статической прочности по приведенным напряжениям,
![]() ,
выполняется.
,
выполняется.
В
сечении
(z
= a
+ b)
рассчитаем
аналогично, с учетом того, что наибольшие
нормальные напряжения определяются
величиной изгибающего момента
![]() и
моментом сопротивления сечения вала
(с диаметром
шестерни по впадинам):
и
моментом сопротивления сечения вала
(с диаметром
шестерни по впадинам):


Условие статистической прочности по приведенным напряжениям,
![]() ,
выполняется.
,
выполняется.