

1.4.2.Супутниковий метод
Для
простоти приймемо Землю за кулю з центром
у точці 0,
а орбіту супутника К
вважатимемо коловою. Нехай спостерігач
знаходиться на полюсі в точці Р
і вимірює кут
![]() і час t.
і час t.
Позначимо радіус Землі і орбіти через R і R1. Початок системи координат візьмемо в центрі Землі. Координати супутника в момент t визначають за формулами:
Xk=R1sin(ω1t+a0);
Yk=R1cos(ω1t+a0),
де ω1 - кутова швидкість руху супутника; a0 - кутове положення супутника на орбіті, яке відлічують від екватора в початковий момент.
З рис. 1.З видно, що
tgα=![]() . (1.16)
. (1.16)
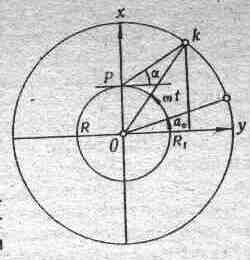
Рис. 1.3. До супутникового методу
Далі, застосовуючи третій закон Кеплера, згідно з яким квадрати періодів Т обертання небесних тіл відносяться як куби їхніх середніх відстаней R від притягаючого центра, напишемо:
![]()
![]() (1.17)
(1.17)
де
Т1=
![]() -
період обертання супутника; k
=
-
період обертання супутника; k
=
![]() -
постійний коефіцієнт (для Землі він
становить 4π2/398600
с2/км3);
Т
- період обертання Землі.
-
постійний коефіцієнт (для Землі він
становить 4π2/398600
с2/км3);
Т
- період обертання Землі.
За формулами (1.16) і (1.17) можна скласти рівняння
α=arctg (1.18)
(1.18)
![]() .
.
відносно невідомих R, R1 і а0. Маючи багато результатів спостережень α і t, легко скласти систему рівнянь типу (1.18) і знайти радіус Землі та інші параметри.
У реальних умовах визначити розміри і форму Землі супутниковим методом набагато складніше. При цьому враховують еліпсоїдальність Землі. Орбіта супутника не може бути точним колом. Її визначають з високою точністю за спостереженнями супутника. На сьогодні точність передачі координат на великі відстані супутниковим методом становить кілька метрів.
Найточніше гравітаційне поле Землі та її фігуру визначають за гравіметричними й супутниковими даними. За даними супутника фігуру геоїда визначено з похибкою 4 м, велику піввісь земного еліпсоїда -з похибкою 5 м, а стиснення - з 0,002 знаменника.
2. Геометрія земного еліпсоїда
2.1. Параметри земного еліпсоїда, зв’язки між ними
Поверхня еліпсоїда утворюється від обертання еліпса навколо його малої (полярної) осі.
Будь-який еліпс визначається розмірами його великої а і малої b півосей (рис. 2.1). За розмірами півосей можна знайти положення фокусів F1 і F2 еліпса
OF1=OF2=![]()
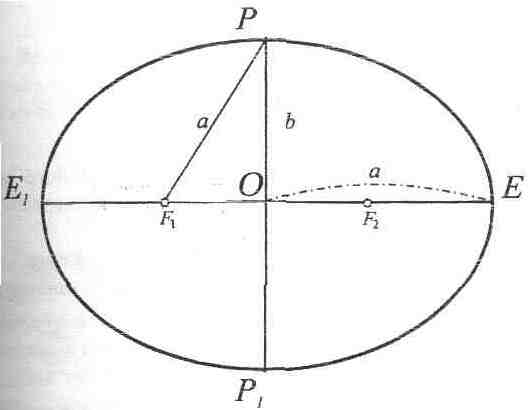
Рис. 2.1
Відносна величина, що визначається зі співвідношення, називається першим ексцентриситетом еліпса.
![]() ,
(2.1)
,
(2.1)
Мають застосування й інші відносні величини: другий ексцентриситет
![]() , (2.2)
, (2.2)
полярне стиснення
![]() . (2.3)
. (2.3)
Розміри еліпса визначаються розмірами його великої півосі а. Форма еліпса визначається однією із наведених вище відносних величин, найчастіше це стиснення α
Крім великої та малої півосей еліпса, часто засто-совується ще одна лінійна величина, що визначається зі співвідношення
![]()
(2.4)
Наведені лінійні та відносні величини еліпса називаються параметрами еліпса і відносяться й до еліпсоїда обертання. Параметри а - велика (екваторіальна) піввісь еліпсоїда і b - мала (полярна) піввісь еліпсоїда або а і α називають основними параметрами, що визначають еліпсоїд обертання, а квадрати першого та другого ексцентриситетів – е2 та е'2 – похідними.
Між перерахованими величинами існують залежності. Так, із (2.1) та (2.2) отримаємо:
![]()
![]() ,
,
(![]() 2.5)
2.5)
![]()
Враховуючи вище наведені залежності для полярного стиснення α та першого ексцентриситета е, отримаємо такі формули зв'язку
(![]() 2.6)
2.6)
![]()
Для виводу числових значень параметрів земного еліпсоїда, переважно великої півосі та стиснення, використовуються відповідні геодезичні, астрономічні, гравіметричні та супутникові виміри.
Для наближених розрахунків можна використовувати наступні значення:
a=6378 км,
a-b=21км,
![]()
![]()
Відомо багато еліпсоїдів, параметри яких визначались у різних регіонах Землі і названі на честь видатних вчених, керівників робіт, що їх визначали або стали Міжнародними (див.табл.2.1):
Таблиця 2.1
Назва Еліпсоїда |
Екваторіальний радіус, м |
Стиснення |
1 |
2 |
3 |
Красовського (1940) |
6378245 |
1/298,3 |
Міжнародний (1924) |
6378388 |
1/297 |
Кларка (1880) |
6378249,145 |
1/293,465 |
1 |
2 |
3 |
Бесселя (1841) |
6377397,155 |
1/299/1528128 |
Ері (1830) |
6377563,396 |
1/299,3249646 |
Евереста (1956) |
6377301,243 |
1/300,8017 |
Гельмерта (1906) |
6378200 |
1/298,3 |
Південноамериканський (1969) |
6378160 |
1/298,25 |
WGS72 (1972) |
6378135 |
1/298,26 |
GRS80 (1979) |
6378137 |
1/298,257222101 |
WGS84 |
6378137 |
1/298,257223563 |
Для еліпсоїда Красовського, що застосовується у гео- дезичних роботах в Україні, крім основних параметрів (див. табл. 2.1), згідно з наведеними вище формулами зв'язку, маємо:
b= 6356863.01877;
e2=0.006693421623;
е '2 = 0.00673 8525415.
На даний час, згідно з резолюцією XVII Генеральної Асамблеї Міжнародної геодезичної та геофізичної спілки (Канберра, 1979), офіційною референцною системою Міжнародної асоціації геодезії є Геодезична Референцна Система 1980 року - GRS-80. Ця система визначає основні параметри загального земного (глобального) еліпсоїда. Серед них
а =6378137м,
![]()
Починаючи з 1987 року, глобальна система визначення місцеположення (GPS) використовує, як опорну, Світову геодезичну систему WGS-84. Поверхнею віднесення цієї системи є геоцентричний еліпсоїд обертання з параметрами:
![]()
![]()
Зазначимо, що прийняття загального земного чи ре-ференц-еліпсоїда, тобто його розмірів, є одним з основних чинників, що характеризує певну систему геодезичних координат.