

Обобщенная статическая характеристика описывается
Линеаризованным выражением ,
трение и масса золотника пренебрежимо малы ,
параметры жидкости постоянны .
Представленные допущения вполне обоснованы. Действительно, обобщенная статическая характеристика ГУ сопло - заслонка практически линейна в широком диапазоне смещений заслонки (см. выше), трение в золотниках обычно не превышает 10Н и существенно меньше сил давления, действующих на золотник, а масса золотников в ЗГР небольшой и средней мощности составляет 0,005…0,015 кг.
Исходные дифференциальные уравнения движения ГУ включают по аналогии с ДГП уравнение сил и уравнение расходов.
Уравнение сил : рд Аз = Сз Х , Аз = dз2 / 4 – площадь торца золотника , dз – диаметр золотника , Сз – суммарная жесткость пружин под торцами золотника, Х – смещение золотника от среднего положения .
Уравнение расходов: kQhh – kQp рд=Аз(dХ/dt)+(Vz/2E ) (dpд /dt) .
Здесь Vz - объем сжимаемой жидкости под одним торцем золотника (обычно не превышает 1…2см3).
В уравнение расходов, в отличие от жесткой модели ДГП, не входит член с перетечками жидкости, поскольку в диагонали моста сопло - заслонка они практически отсутствуют.
В результате совместного решения обоих уравнений после приведения к операторной форме записи получим выражение передаточной функции ГУ :
pд (s) kph x (s) kxh
Wгу (s) = = или Wгу (s) = = ,
h (s) Тгу s + 1 h (s) Тгу s + 1
где Тгу = (1/kQp ) [ ( Aз2 / Cз ) + (Vz / 2E ) ] – постоянная времени ГУ , kxh= kph Aз / Cз – коэффициент передачи ГУ.
Из представленных выражений следует , что для увеличения быстродействия ГУ сопло – заслонка (уменьшения Тгу ) следует повышать kQp , т.е. расход жидкости через сопла(k Qp= kQh / kph= Qc / h0 kph) , уменьшать dз и увеличивать жесткость пружин Сз . Последнее обуславливает необходимость применения золотников с малым рабочим ходом , т.е. длина окна не должна превышать 0,5…1 мм .
Наиболее эффективно уменьшение диаметра золотника. Так, уменьшение dз в 2 раза снижает Тгу (при прочих равных условиях) в 16 раз. Поэтому в ГУ небольшой и средней мощности обычно используют золотники с диаметром не более 5…8мм.
Второй член в квадратных скобках выражения для Тгу практически не влияет из -за малости объема Vz .
Из полученной передаточной функции следует, что при ступенчатом перемещении заслонки процесс нарастания давления pд и, следовательно, перемещения Х имеет затянутый апериодический характер, что иллюстрируется рис.59. Там же представлена структурная динамическая схема ГУ.

kxh Tгу
s + 1
h (s) x (s)
Рис.59
Существующие конструкции ГУ этого типа для приводов небольшой и средней мощности имеют величину Тгу не менее (8 10-3 )с при диаметре золотника 5…6мм, и (15 10-3 )с для диаметра 8мм.
Полученные выше дифференциальные уравнения движения ЭМП и ГУ не отражают такой важный фактор, как силовую реакцию струй жидкости, вытекающей из сопел заслонку. Данная реакция воздействует на заслонку и , следовательно , якорь ЭМП , нагружая его. Это воздействие ( в виде обратной связи ) обуславливает необходимость рассмотрения ЭМП и ГУ как общую динамическую систему – ЭГУ .
Физическая картина формирования реакции струй поясняется рис.60. На заслонку ГУ воздействует 2 силы - гидростатическая и гидродинамическая. Первая создается давлением р3 перед соплом и дросселирующим зазором (оно принимается одинаковым). Вследствие абсолютной малости зазора z между срезом сопла и заслонкой, не превышающего 10% диаметра сопла, давление в зазоре практически не падает и полностью давит на заслонку на площади Ас = π dc2/4, образуя гидростатическую составляющую : R1= p3 Ac . Эта же составляющая у правого сопла равна R2= p4 Ac и направлена встречно.
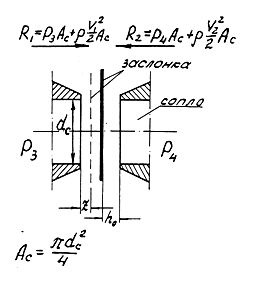
Рис.60
С другой стороны, струя жидкости, вытекающая из сопла с большой скоростью (50м/с и выше), создает динамическое давление в результате торможения у заслонки и разворота потока. При этом гасится практически весь скоростной напор и кинетическая энергия струи переходит в потенциальную энергию давления, создавая гидродинамическую составляющую реакции струй : R3 = Ac (ρ V12 / 2) , где ρ - плотность жидкости, V1 – cреднее значение скорости потока в левом сопле
(V1= Q1/Ac, Q1 - расход жидкости через левое сопло).
По аналогии гидродинамическая составляющая от правого сопла равна R4 = Ac (ρ Q22/ Ac2) и вычитается из R3.
Результирующая силовая реакция определится выражением
R = (R1+R3) - (R2+R4) = Ac (p3 - p4) + ρ/Ac (Q12 - Q22).
После ряда преобразований можно записать:
R = Ac ( k1 pд + k2 h ) .
Здесь k1 и k2 – конструктивные коэффициенты .
Тогда уравнения системы ЭМП – ГУ примут вид :
1)Уравнение сил на якоре ЭМП в операторной форме записи :
Сэмп(Тэмп2 s2+2эмпТэмп s+1)h(s) = kFi iy(s) - Ac[k1 pд (s) + k2 h (s)] ,
2) Уравнения ГУ сопло – заслонка :
kph h (s) = ( Тгу s + 1 ) pд (s) , Х(s) = (Aз /Cз ) pд (s) .
Поскольку
быстродействие ЭМП очень велико , на
практике можно считать Тэмп
= 0 . Тогда
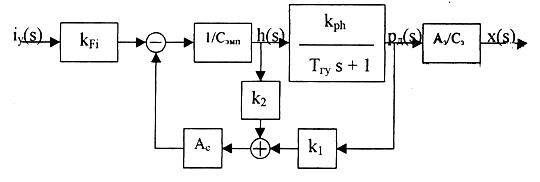
структурно – динамическая схема ЭГУ
на основании записанных уравнений
примет вид рис.61:
 :
:
Рис.61
В результате преобразований данной схемы или совместного решения записанных уравнений получим передаточную функцию
ЭГУ – 1(под этим индексом понимается схема ЭГУ , включающая золотник с пружинами) относительно тока iy :
Х(s) kэгу
Wэгу (s) = = ,
iy (s) Тэгу s + 1
здесь kэгу = kFi kph Aз / Cэмп Сз ( 1 + Сзс Сэмп ) – коэффициент передачи ЭГУ , Сзс = Ас (k2 + k1 kph ) – жесткость реакции струй,
Тэгу= Тгу (1+ k2Ac /Сэмп) / (1 + Cзс / Cэмп ) – постоянная времени ЭГУ . Тэгу < Tгу .
Отсюда следует, что реакция струй уменьшает коэффициент передачи системы ЭМП – ГУ в раздельном представлении, а также повышает быстродействие .
Существующие конструкции ЭГУ – 1 с золотниками малого диаметра (5…6мм) и Хm=0,5…1мм имеют по статистическим данным постоянную времени Тэгу=(5…6) 10-3с, что близко к теоретическому пределу.
Полная структурно – динамическая схема ЭГУ-1 в линейном приближении с учетом электрической цепи ЭМП показана на рис.62.
В соответствии с ней ЭГУ – 1 описывается передаточной функцией 5-го порядка по отношению к напряжению Uy .
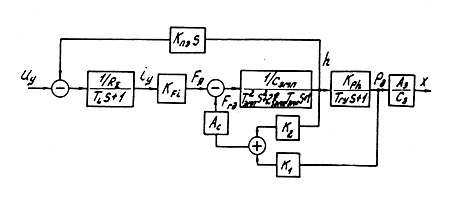
Рис.62
Схема ЭГУ – 1 получила широкое распространение в авиационных следящих гидроприводах различного назначения, она технологически отработана, относительно проста в производстве, надежна. Вместе с тем ей присущ ряд недостатков :
Увеличенное трение золотника ЗГР , обусловленное радиальной составляющей силы сжатия пружин, обладающих высокой жесткостью.
Пружины имеют предварительное поджатие, превышающее величину Хm и при жесткости каждой из них 150…200Н/мм создают значительное усилие как в осевом, так и частично в радиальном направлении. Это приводит к прижатию золотника к внутренней поверхности гильзы и появлению повышенного трения. Поэтому в конструкции ЗГР предусмотрены меры разгрузки , когда пружины опираются не напрямую в торец золотника, а через специальные промежуточные детали. Существуют схемы разгрузки на шариках, на конусах и на иглах (рис.63). Разгрузка на шариках (а) наиболее проста, но наименее эффективна. В настоящее время наиболее широко используется разгрузка на конусах (б), но самой лучшей считается разгрузка на иглах (в) вследствие минимальной базы действия радиальных сил.
Недостатком этой разгрузки является сложность реализации в золотниках малого диаметра (менее 8мм).
Несмотря на наличие разгрузки, сила трения в золотнике ЭГУ – 1 может достигать 10…15Н.
Сравнительно низкая температурная стабильность статических и динамических характеристик.
Это объясняется тем, что коэффициент передачи ЭГУ и постоянная времени зависят от гидравлических параметров (коэффициентов k1 и k2), которые сильно меняются по температуре из – за вязкости жидкости. Наклон характеристики давления ГУ сопло – заслонка может различаться в 1,5…2 раза в диапазоне температур (– 600С …+1000С), что отрицательно влияет на качество следящего гидропривода в целом.
В ряде случаев недостаточное быстродействие.
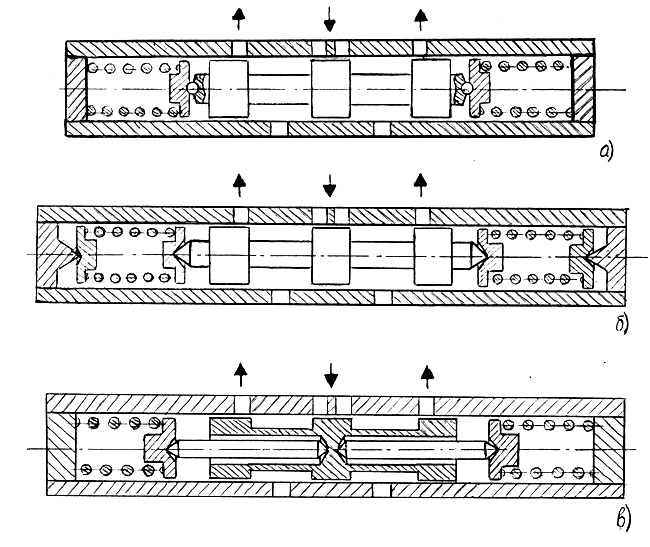
Рис.63
В следящих гидроприводах высокого быстродействия (например, рулевых приводах маневренных самолетов и ракет) величина постоянной времени 5…6 миллисекунд уже оказывает существенное влияние на характеристики контура и нуждается в уменьшении. В рамках рассмотренной схемы ЭГУ – 1 снизить Тэгу практически не удается, поэтому с середины 60-х г.г. проводились масштабные ОКР по разработке альтернативных схемных решений для перспективных ЭГУ.
Рассмотрим схемы и характеристики ЭГУ других типов, не имеющих отмеченных выше недостатков ЭГУ – 1. Это схемы с различными видами обратных связей по положению золотника. Их коренное отличие – использование т.н. «свободноплавающего золотника» без силовых пружин, обладающего низким уровнем трения – 3…4Н и менее.
Наиболее распространенным вариантом такого ЭГУ, широко используемым в настоящее время в авиационных и ракетных ЭГСП является ЭГУ с упругой механической обратной связью по положению золотника (условное обозначение – ЭГУ – 2). Его схема представлена на рис.64. Особенность схемы – наличие упругой пластины (пружины обратной связи), соединяющей золотник с заслонкой.

Рис.64
Принцип работы ЭГУ – 2 основан на балансе силы , создаваемой ЭМП на заслонке при протекании тока iy в обмотках , и силы деформации пружины обратной связи , связанной со свободноплавающим золотником . ЭГУ в нормальных условиях работает при минимальном перепаде давления рд , близком к 0 и обусловленном низким уровнем трения свободноплавающего золотника.
В основе ЭГУ – 2 также находится гидравлический мост сопло – заслонка со всеми необходимыми элементами. При подаче тока iy в обмотки ЭМП якорь – заслонка смещается, например, влево. Давление р3 увеличивается, р4 - уменьшается, под действием перепада рд = (р3 – р4 ) золотник смещается вправо, сгибая пружину обратной связи и тем самым стремясь вернуть заслонку в исходное нейтральное положение. Когда усилие, создаваемое ЭМП на заслонке уравновесит силу деформации пружины, заслонка придет практически в нейтральное положение и движущая сила для золотника (перепад рд) прекратится. Золотник остановится в смещенном положении и нагружен только небольшой силой изгиба пружины обратной связи.
При изменении тока управления баланс сил нарушится и вызовет перемещение золотника в новое положение. Таким образом, золотник отслеживает величину тока iy c некоторым коэффициентом пропорциональности.
Лекция 15.
Рассмотрим уравнения движения для ЭГУ - 2 и его динамические свойства с точки зрения сравнения с ЭГУ - 1.
С учетом ранее принятого допущения Тэмп = 0 и рд = 0 уравнение баланса сил на якоре ЭМП примет вид :
kFi iy (s) = Cэмп h (s) + Coc [Х(s) + h(s)] +k2 Ac h(s) .
Здесь отсутствует гидростатическая составляющая силовой реакции струй. Но добавился новый член, учитывающий силу изгиба пружины обратной связи, равный ее жесткости Сос, умноженной на величину деформации. Последняя определяется суммой координат Х и h, поскольку перемещение золотника и заслонки осуществляется в противоположных направлениях.
Уравнение расходов ГУ сопло – заслонка :
kQh h(s) = Aз s Х(s) .
В отличие от ЭГУ - 1 мост сопло - заслонка не нагружен давлением рд , поэтому в уравнении обобщенной статической характеристики ГУ (левая часть уравнения расходов) отсутствует член с давлением рд . По этой же причине в правой части уравнения нет составляющей расхода на сжимаемость.
В результате решения уравнений можно записать выражение передаточной функции ЭГУ :
Х(s) kэгу
Wэгу (s) = = ,
iy(s) Тэгу s + 1
где kэгу = kFi / Coc – коэффициент передачи ЭГУ ,
Тэгу = (Аз / kQh )(C / Coc)– постоянная времени . Добротность замкнутого контура ЭГУ равна 1/Тэгу . Здесь С = Сэмп + k2 Ac + Coc .
Из выражения для kэгу следует, что он не зависит от гидравлических параметров, а следовательно отсутствует сильное влияние температуры жидкости. Стабильность коэффициента kFi зависит от постоянства свойств магнитов поляризации, индукция которых несколько уменьшается с ростом температуры вплоть до точки Кюри. С другой стороны, жесткость металла пружины обратной связи также снижается по температуре. Поэтому данная схема ЭГУ характеризуется очень высокой температурной стабильностью коэффициента передачи. Она широко используется в ЭГСП, работающих в условиях как высоких, так и низких температур рабочей жидкости и окружающей среды ( - 600С…+4000С).
Постоянная времени может быть уменьшена за счет повышения добротности ЭГУ - 2. Способы ее увеличения :
применение золотников малого диаметра , как и в схеме ЭГУ - 1, но эффективность данной меры существенно ниже (при уменьшении диаметра золотника в 2 раза постоянная времени снижается только в 4 раза),
увеличение расхода через сопла Qc , но ценой возрастания энергетических потерь в ГУ,
увеличение жесткости пружины обратной связи , т.е. в конечном счете использование ЭМП с повышенными тяговыми свойствами . Это может быть достигнуто за счет применения мощных магнитов поляризации на редкоземельной основе и увеличения размеров магнитопроводов и якоря с целью повышения тока насыщения , или изготовления этих деталей из кобальтовых сплавов или магнитных материалов типа «металлическое стекло», имеющих высокую индукцию насыщения.
уменьшение жесткости подвески якоря Сэмп . Однако при этом увеличивается механическая постоянная времени ЭМП, что отрицательно сказывается на быстродействии ЭГУ в целом.
Практика показала, что на существующей элементной базе обеспечить добротность более 200 1/c (что соответствует Тэгу = 5 10-3 с) в рамках данной схемы как правило не удается .
Полная структурно – динамическая схема линеаризованного ЭГУ – 2 с учетом электрической цепи ЭМП соответствует системе 5-го порядка . Она представлена на рис.65.
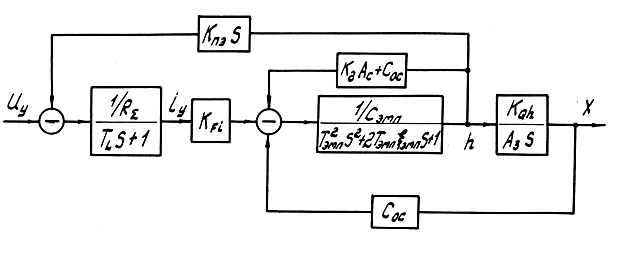
Рис.65
В целом быстродействие ЭГУ – 2 выше , чем ЭГУ – 1 . Постоянная времени Тэгу для ЭГУ - 2 по расчетам в 1,5 раза ниже при одинаковых параметрах ЭМП и ГУ сопло – заслонка . Это иллюстрируется сравнительными логарифмическими частотными характеристиками ЭГУ – 1 и ЭГУ – 2, показанными на рис.66. Характеристики приведены к единичному коэффициенту передачи и рассчитаны на основании структуры на рис.65.
Рассмотрим еще одну схему ЭГУ с обратной связью по положению золотника, получившую широкое распространение в современных ЭГСП, применяющихся в ЭДСУ сверхзвуковых аэродинамически неустойчивых самолетов. Это схема ЭГУ с электрической обратной связью по положению золотника, условно обозначаемая как ЭГУ – 3 .
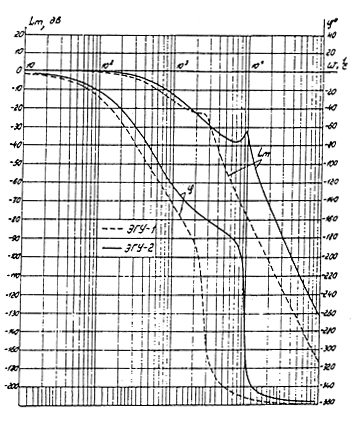
Рис.66
Радикально увеличить добротность ( следовательно , повысить быстродействие и точность работы ЭГУ) можно включением электрического усилителя в следящий контур управления золотником , используя электрическую обратную связь по положению золотника . Схема ЭГУ - 3 дана на рис. 67.
Помимо высокого быстродействия ЭГУ – 3 характеризуется минимальной зоной нечувствительности , точным позиционированием золотника (повышенной линейностью управляющей характеристики) , оперативным изменением коэффициента передачи и смещения нуля .
По аналогии с предыдущими разделами рассмотрим уравнения движения и особенности динамики ЭГУ - 3.
Исходные уравнения :
Электрический усилитель сигнала ошибки : U = Uвх - Uoc ,
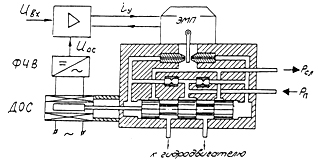
Рис.67
Uy = ky U , здесь Uθ - напряжение сигнала ошибки,
ky - коэффициент усиления по напряжению.
Электромеханический преобразователь :
Электрическая цепь Uy = (Ro+Rвых) + L (diy/dt) + kпэ (dh/dt) ,
Механическая система mя (d2h/dt2) = kFi iy – bя (dh/dt) – Cэмп h - k2 Ac h ,
Гидроусилитель сопло - заслонка kQh h = Aз dХ/dt ,
Индукционный датчик обратной связи Toc dUoc/dt + Uoc = kocХ.
Здесь Тос - постоянная времени цепи обратной связи .
В этих уравнениях также не учитывается гидростатическая составляющая
реакции струй и перепад давления рд .
Cтруктурно – динамическая схема линеаризованного ЭГУ – 3 на основании данных уравнений, записанных в операторной форме имеет вид :
1/R TLs+1
khi Tэмп
2s2+2Tэмпэмпs+1
kQh Aз
s
U
ky
kпэs


 -
-
-
-
koc Tocs+1


 Uoc
Uoc
Упрощенная структурная схема данного ЭГУ (Тэмп=0 ,Тос=0), приведенная к единичной обратной связи :
Кд s(TLs+1)

 Хвх
Х
Хвх
Х
-

Здесь Хвх = Uвх / koc , Kд = ky khi kQh koc / R Aз – добротность замкнутого контура ЭГУ – 3 , TL = TL + ( khi kпэ / R ) – электрическая постоянная времени с учетом противоЭДС.
Тогда передаточная функция замкнутого контура :
Х(s) kэгу
Wэгу (s) = = ,
Uвх(s) Тэгу2 s2 + 2 Tэгу эгу s + 1
где kэгу = 1/ koc – коэффициент передачи ЭГУ – 3 , Тэгу = (ТL/Kд )0.5 – постоянная времени , эгу = 1/ 2 ( TL kд )0.5 – коэффициент относительного демпфирования .