

Конспект лекций
по курсу «Элементы систем управления летательных аппаратов» для
студентов дневного отделения каф. 106 (специальность 131400).
Часть I. Исполнительные устройства систем управления ла.
Лекция 1.
Курс лекций «Элементы систем управления ЛА» включает 2 части. В 1-й рассматриваются исполнительные устройства систем управления – следящие приводы, она читается на 7-м семестре. 2-я посвящена информационным устройствам систем управления и читается на 8-м семестре.
Целью 1-й части курса является ознакомление студентов с принципом работы и характеристиками основного вида следящих приводов, используемых в качестве исполнительных устройств для систем управления пилотируемых и беспилотных ЛА – гидравлических следящих приводов, методиками расчета их статических и динамических параметров.
Задачи курса:
- Изучение типовых устройств гидроавтоматики и гидравлических приводов в целом, а также рабочих процессов, протекающих в них.
- Освоение основ расчёта базовых параметров и характеристик (статических и динамических) гидроприводов и их основных устройств.
- Изложение студентам проблем, стоящих перед разработчиками гидроприводов перспективных летательных аппаратов, и вероятных путей их решения.
Курс включает 34 часа лекций (17 лекций) и 16 часов лабораторных работ (4 лабораторных работы). В конце семестра студенты сдают теоретический зачет по 1-й части курса .
Основной первоисточник информации при подготовке к сдаче зачета– конспект лекций студента. В процессе изложения курса будет выдаваться раздаточный материал. Дополнительная информация может быть получена из следующих литературных источников:
Н.С.Гамынин. Гидравлический привод систем управления. Учебное пособие для ВУЗов. М: Машиностроение, 1972г., 376с.
Гидравлические приводы летательных аппаратов /Под ред. Карева В.И., Учебник для ВУЗов, М: Машиностроение, 1992г., 368с.
Перечень дополнительной литературы:
Н.А.Борисова, Н.С.Гамынин, В.И.Карев, А.М.Селиванов. Гидравлика и гидроавтоматика. Учебное пособие . – М: МАИ, 1985г. 78с.
С.А.Ермаков, В.И.Карев, А.М.Селиванов. Проектирование корректирующих устройств и электрогидравлических усилителей следящих гидоприводов ЛА. Учебное пособие. – М: МАИ, 1990г. 80с.
Ю.Г.Оболенский. Управление полетом маневренных самолетов. М : Филиал ФГУП «Военное издательство» МО РФ, 2007г. 480с.
Перейдем непосредственно к изложению содержания курса.
Понятие «привод» в самом общем представлении подразумевает техническое устройство (или совокупность технических устройств) для перемещения какой – либо полезной нагрузки с помощью рабочего тела , т.е. материальной среды, через которую осуществляется передача энергии движения .
В зависимости от вида рабочего тела различают 3 типа приводов – электрические , газовые и гидравлические . В первом случае рабочим телом является магнитное поле , создаваемое вокруг проводника с током , при этом взаимодействие данного поля с внешним магнитным полем создает движущую силу . Рабочим телом газовых приводов является сжатый холодный или горячий газ . И , наконец , рабочим телом гидравлических приводов служит жидкость высокого давления.
В состав любого привода обязательно входит источник энергии , а также двигатель , перемещающий полезную нагрузку. В большинстве случаев имеется устройство управления двигателем – регулятор (хотя простейшие приводы могут состоять только из двигателя) . Источником электрической энергии является генератор постоянного или переменного тока , аккумулятор или химическая батарея , топливные элементы и т.п. Источник холодного сжатого газа – компрессор , газовый баллон , а горячего – пороховая шашка или газогенератор .
Источником энергии в гидроприводах является насос с приводным двигателем или газогидравлический аккумулятор вытеснительного типа. Наряду с ними в состав гидросистемы питания привода входит также регулирующая и коммутирующая аппаратура (клапаны различного назначения) , гидроемкости (баки с рабочей жидкостью и гидроаккумуляторы) , устройства кондиционирования рабочей жидкости (фильтры , теплообменники) , контрольно – измерительная аппаратура и система соединительных гидромагистралей – трубопроводов .
Блок – схема типового гидропривода представлена на рис. 1 .
В настоящее время гидроприводы находят широкое применение в различных технических отраслях , в том числе являются основным типом привода авиационной и ракетно – космической техники
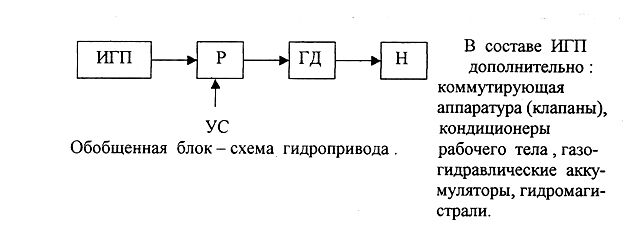
Рис.1
Данное обстоятельство обусловлено рядом коренных преимуществ гидроприводов в сравнении с электрическими и газовыми :
высокий уровень давления рабочего тела (до 56 МПа и более) ,
низкая сжимаемость рабочего тела ,
значительная энергоемкость (удельная мощность) ,
высокое быстродействие (динамические свойства) ,
относительно небольшая масса и размеры гидроагрегатов .
Следует отметить следующие основные особенности гидроприводов
в сравнении, например, с электроприводами:
- давление рабочего тела ( 28…56 Мпа в сравнении с эквивалентным давлением магнитного поля в рабочем зазоре электрической машины 1…2 Мпа с теоретическим пределом 4…10 Мпа для электродвигателей магнитоэлектрического возбуждения с редкоземельными магнитами ) ,
- пусковые ускорения ( до 10 000 рад/c2 в сравнении с 1000 рад/c2 для типовых систем с электродвигателями ) ,
- удельная масса ( 0,1…0,4 кг/кВт для насосов - 1…4 кг/кВт для электрогенераторов , 0,3…0,4 кг/кВт для гидродвигателей – 2…30 кг/кВт для электродвигателей ) ,
- мощность на единицу объема ( 2 кВт / дм3 для гидроприводов , 0,05…0,2 кВт / дм3 для электроприводов ) ,
- ресурс ( 1…5 млн.циклов работы – гидропривод , 0.5 млн.циклов – для контактных систем электропривода),
- высокая точность позиционирования .
К недостаткам гидроприводов относится сложность монтажа , эксплуатации и высокая стоимость источника гидропитания , влияние температуры на характеристики , технологические ограничения .
В системах управления объектами различного назначения нашел применение особый класс приводов – следяшие , представляющие собой сложные системы автоматического регулирования с комплексом обратных связей (положительных, или чаще отрицательных). Следящий привод предназначен для преобразования маломощного управляющего сигнала в пропорциональное перемещение нагрузки с заданной мощностью , точностью и быстродействием .
Структурная схема простейшего следящего привода изображена на рис.2. Она содержит единственный контур отрицательной обратной связи по перемещению выходного звена (нагрузки) , реализуемой с помощью датчика обратной связи (ДОС) . Сигнал ДОС сравнивается с управляющим сигналом (УС) в сравнивающем усилительном устройстве (СУУ) и выделенная разность после усиления поступает в регулятор (Р) , управляющий двигателем Д . Движение выходного звена при этом направлено в сторону уменьшения имеющейся ошибки (разности сигналов) , в результате перемещение У пропорционально в установившемся режиме величине УС , т.е. имеет место «отслеживание» управляющего сигнала .
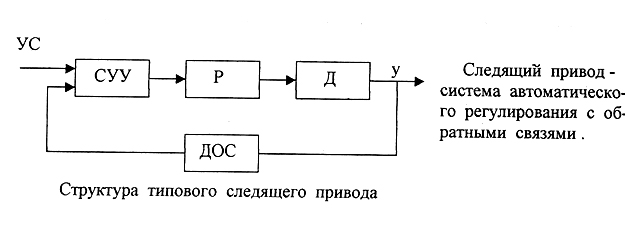
Рис.2
Cтруктура на рис. 2 является наиболее общей, в частных случаях СУУ может отсутствовать , как и ДОС в виде отдельного функционального устройства .
Cледящие приводы разной физической природы находят широкое применение на современных ЛА , в том числе в качестве исполнительных устройств систем управления. Например, самолет ИЛ - 96 - 300 содержит на борту 68 только гидравлических приводов различного назначения, не считая электрических и газовых. Все следящие приводы рулевой группы являются гидравлическими, они выполняют наиболее важные функции пилотирования ЛА.
Рассмотрим в качестве примера место и назначение следящего рулевого привода в типовой системе продольного управления ЛА с высокими летно - техническими характеристиками.
Упрощенная структурная схема системы представлена на рис.3.
Система содержит 2 замкнутых контура - внутренний (контур демпфирования) и внешний - контур стабилизации.
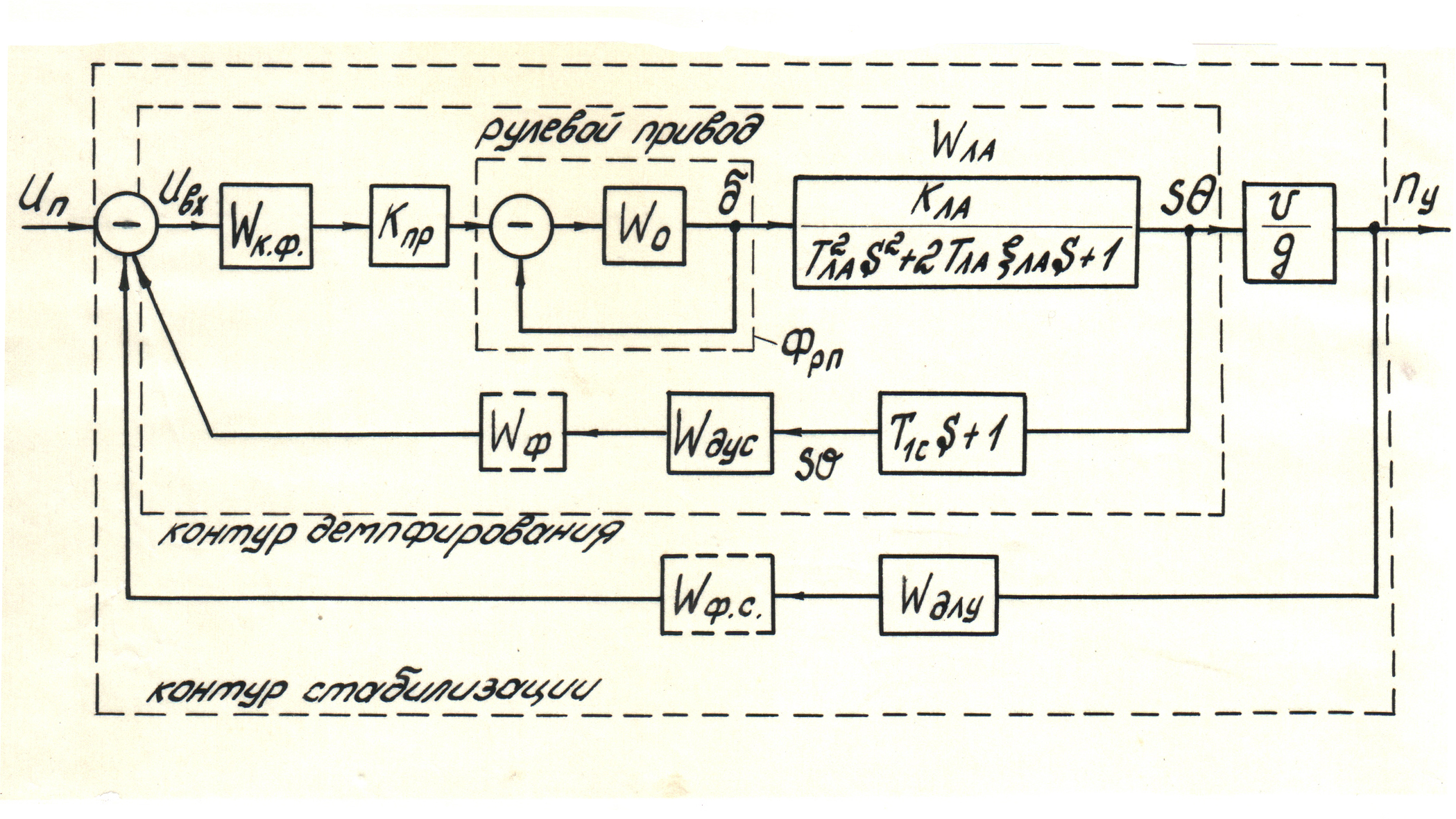
Рис.3
Последний обеспечивает траекторное управление ЛА и замкнут по нормальной перегрузке ny. Это определяет пропорциональность перегрузки входному управляющему сигналу Uп , формируемому летчиком (для пилотируемых ЛА) или бортовой системой наведения для беспилотных ЛА.
Контур демпфирования обеспечивает качество переходного процесса в короткопериодическом движении ЛА относительно центра масс. Это позволяет существенно снизить колебательность ЛА, обусловленную как правило низким собственным демпфированием .
На рис.3 обозначено : Wкф , Wф , Wфс - передаточные функции фильтров (специальных динамических звеньев, вводимых в систему с целью улучшения ее характеристик), Wдус, Wдлу - передаточные функции датчика угловой скорости (демпфирующего гироскопа) и датчика линейных ускорений (акселерометра) соответственно, W0 - передаточная функция разомкнутого рулевого привода, Фрп - передаточная функция замкнутого рулевого привода, приведенного к единичной обратной связи, Кпр - коэффициент передачи привода, Т1с - постоянная времени пересчета координат, КЛА - коэффициент передачи ЛА, ТЛА - постоянная времени колебательного звена ЛА, ξЛА - коэффициент относительного демпфирования ЛА, θ - угол наклона вектора скорости полета к линии горизонта, υ - угол тангажа, V - скорость полета ЛА, g - ускорение силы тяжести, δ - угол поворота рулевой поверхности.
Основным элементом, определяющим динамику системы управления в целом, является летательный аппарат, учитываемый передаточной функцией WЛА. Это наименее быстродействующее звено контуров системы. Собственные частоты ωЛА=1/ТЛА лежат в широких пределах, от 1 1/с (тяжелые пассажирские и транспортные самолеты) до 60 1/с (маневренные управляемые ракеты класса «воздух - воздух») . Прочие элементы системы не должны ухудшать ее параметры, поэтому их быстродействие выбирается существенно выше, в том числе и рулевого привода. С этой точки зрения динамика привода зависит от класса ЛА, в системе управления которого используется данный привод. Несмотря на внешне скромное место, занимаемое приводом в структуре на рис.3, его функциональное значение сложно переоценить. Действительно, он отрабатывает весь комплекс сигналов, формируемых системой и в случае нештатной работы привода или его отказа качество управления не обеспечивается или имеют место катастрофические последствия.
По отношению к системе управления привод является подсистемой и его параметры полностью определяются надсистемой, а не задаются произвольно. Это относится в полной мере и к любым другим системам, где привод является исполнительным устройством.
Рассмотрим перечень требований к следящим приводам, налагаемым соответствующими надсистемами :
Энергетические требования, определяемые способностью привода преодолевать внешние нагрузки и обеспечивать необходимую скорость движения. Это одни из важнейших требований, поскольку привод недостаточной мощности не обеспечивает воспроизведение сигнала управления, формируемого надсистемой, и тогда все другие требования уже не имеют смысла.
Поэтому проектирование приводов всегда начинается с определения его энергетических параметров - максимальной скорости движения выходного звена Vmax и максимального выходного усилия Fmax . Эти параметры являются граничными точками предельной механической характеристики (ПМХ) привода. Ход характеристики между этими граничными точками зависит от физической природы и типа привода. «Жесткая» ПМХ соответствует, например, приводу с синхронным электродвигателем (рис.4а), который управляется частотой f . «Мягкие» линейные характеристики ( рис.4б ) присущи электроприводу с электродвигателем постоянного тока и независимым возбуждением, газовому приводу со струйной трубкой, а также гидроприводу с проточным золотником. Наконец, достаточно жесткие нелинейные механические характеристики имеют гидроприводы с дроссельным регулированием скорости и непроточным золотником (рис.4в) .
Лекция 2.
Важное значение имеют параметры внешней нагрузки Fсопр , воздействующей на привод. Усилие Fcопр применительно к системам
управления ЛА включает ряд составляющих и в общем случае может быть представлено в виде :
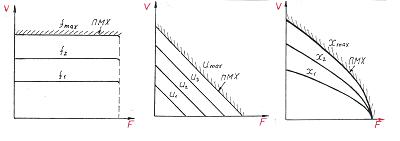
а) б) в)
Рис.4
Fcопр = mн (d2 yн / d t2 )+ Fтр ( d yн / d t ) + Fш ± F0 ,
здесь mн – масса нагрузки , yн – абсолютное перемещение нагрузки , Fтр – обобщенная сила трения в нагрузке , Fш- сила, создаваемая аэродинамическим шарнирным моментом рулевых поверхностей , F0 – постоянная составляющая , обусловленная , например , весовой нагрузкой или воздействием перегрузок при маневрах ЛА в полете . Все составляющие учтены приведенными к выходному звену привода значениями .
Соотношение указанных выше составляющих нагрузки может быть различным в зависимости от типа и характеристик ЛА , режимов полета , особенностей конструкции.
Так , последние десятилетия характеризуются неуклонным повышением инерционных нагрузок на приводы систем управления ЛА различных типов, в том числе рулевые приводы тяжелых самолетов , приводы цельноповоротных рулевых поверхностей (стабилизаторов и килей) сверхзвуковых маневренных самолетов , приводы поворотных сопел ЖРД и РДТТ космических ракет-носителей и баллистических ракет и т.п. Значения mн у современных приводов этого класса достигают несколько тысяч (и даже десятков тысяч) килограммов массы , что создает ряд не только энергетических , но и динамических проблем для разработчиков таких систем .
Сила трения Fтр является в общем случае достаточно сложной функцией скорости перемещения нагрузки и может включать в себя «сухое» (Кулоновское ) трение, линейную составляющую (вязкое трение , обусловленное аэродинамическим демпфированием рулевой поверхности в воздушном потоке) и нелинейное трение, например , квадратичное или трение с «падающей» характеристикой . Обычно скоростное трение невелико , если в системе не предусмотрена установка стабилизирующих или противофлаттерных демпферов , однако сухое трение в ряде случаев может оказаться значительным . Так в приводах поворотных сопел тяжелых ракет сухое трение на активном участке полета с работающими двигателями может достигать 40% полного тормозного усилия привода .
Составляющая Fш определяется шарнирным моментом рулевой поверхности , выражение для которого имеет вид :
Мш = mш Sp bp ( r V2/2 ) ,
где mш – коэффициент шарнирного момента , Sp , bp – площадь и хорда руля соответственно , r - плотность воздуха на высоте полета , V- скорость полета ЛА.
Из данного выражения следует , что шарнирный момент пропорционален кубу линейных размеров ЛА и квадрату скорости полета . Следовательно , шарнирная нагрузка является доминирующей для тяжелых самолетов , а также высокоскоростных ЛА .
Составляющая Fш может быть записана в виде :
Fш @ Сш yн + F0¢ ,
при этом постоянную нагрузку F0¢ можно объединить в расчетах с F0 . В представленном выражении Сш – жесткость шарнирной нагрузки .
Коэффициент mш существенно зависит от режима полета , конструктивных параметров рулевой поверхности и ряда других факторов . Так, в связи со смещением фокуса руля в функции числа М для сверхзвуковых самолетов часто имеет место перекомпенсация по шарнирному моменту на дозвуковой скорости полета (указанный момент направлен в сторону движения ) и значительная недокомпенсация на сверхзвуковой . Данное обстоятельство может быть учтено не только в величине и знаке F0 , но также и в знаке Сш . Тогда выражение нагрузки запишется в виде :
Fcопр = mн (d2 yн / d t2 ) + Fтр ( d yн / d t ) ± Cш yн ± F0 .
Здесь Сш и F0 учтены абсолютными значениями .