

Определение настроечных параметров пи-регулятора

kp – коэффициент усиления ПИ-регулятора;
Tp – постоянная времени ПИ-регулятора.

Рис. 10. Определение постоянной времени ПИ-регулятора по ЛАЧХ системы, для которой выполнены требования к запасам устойчивости по фазе и амплитуде. Частота точки сопряжения касательных с наклоном 0 дБ/дек и -20 дБ/дек является обратной величиной к искомой постоянной времени ПИ-регулятора. 1/Т = 0.18 рад/сек. Т = 5.6 сек.
Введение пи-регулятора в контур управления.
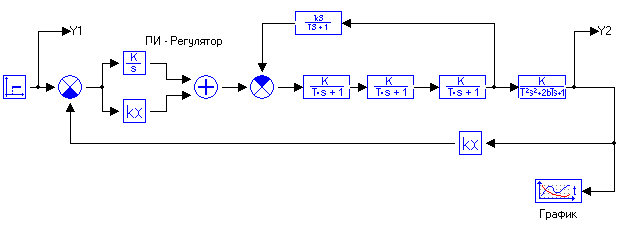
Рис. 11. САР с ПИ-регулятором.

Рис.12. Переходная характеристика Установившееся значение ошибки регулирования равно нулю. В общем САР имеет уже неплохое качество.
В завершение приведем ЛАЧХ и ЛФЧХ разомкнутого контура оптимизированной САР:

Рис. 13. ЛАЧХ и ЛФЧХ разомкнутого контура оптимизированной САР. Запасы устойчивости и по фазе и по амплитуде – хорошие. Переходная характеристика разомкнутого контура линейно увеличивается со временем, что объясняется наличием интегратора в контуре, входящего составной частью в ПИ-регулятор.
Показатели качества установившегося режима.
Д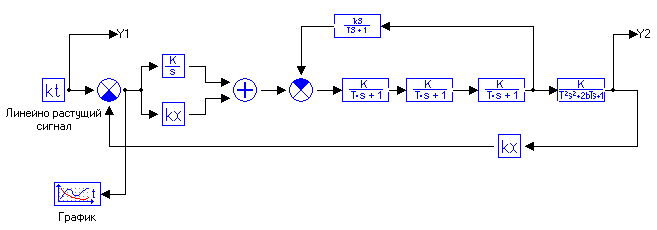 ля
определения коэффициента ошибки по
скорости с1, к входу САР нужно подключить
генератор линейно растущего сигнала:
ля
определения коэффициента ошибки по
скорости с1, к входу САР нужно подключить
генератор линейно растущего сигнала:
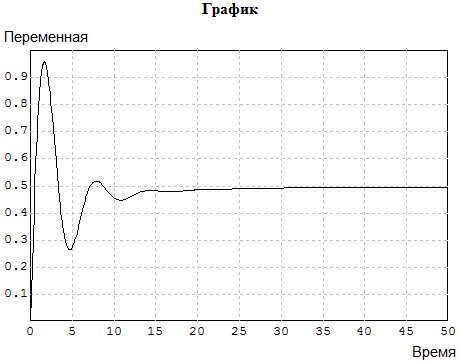
Рис. 14. Диаграмма для определения коэффициента ошибки по скорости астатической САР.
Коэффициент ошибки по скорости с1=0.49
Сар чв дпт осуществляет слежение и стабилизацию.
Д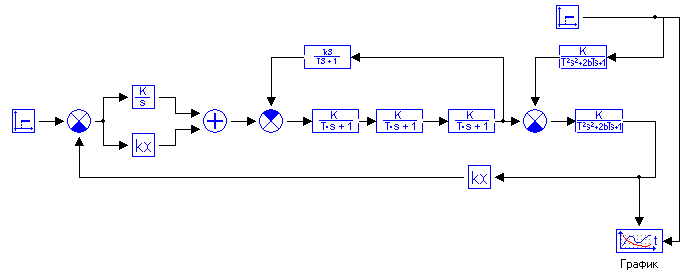 ля
проверки качества САР и в режиме слежения,
и в режиме стабилизации следует
одновременно подать не нее и ступенчатое
задание, и ступенчатое возмущение. Этим
воздействиям для наглядности переходной
характеристики следует придать разные
задержки:
ля
проверки качества САР и в режиме слежения,
и в режиме стабилизации следует
одновременно подать не нее и ступенчатое
задание, и ступенчатое возмущение. Этим
воздействиям для наглядности переходной
характеристики следует придать разные
задержки:
Рис. 15. Совокупное воздействие на САР ЧВ ДПТ ступенчатых задания и возмущения.
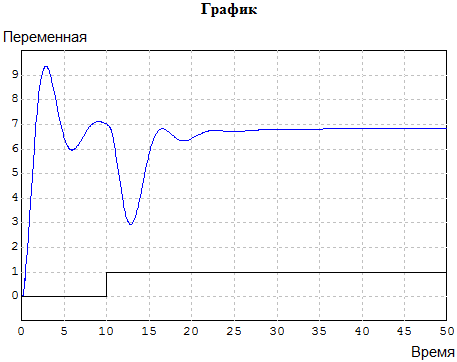
Рис.16. Совокупное воздействие на САР ЧВ ДПТ ступенчатых задания и возмущения. Возмущение задержано относительно задания на 10 сек. По переходной характеристике видно, что САР компенсирует возмущение примерно за 10 сек, с максимальной ошибкой в - 4 об/сек при величине возмущения в 10 Н·м.
Заключение.
В курсовой работе выполнена линейная САР. Ее исследование и оптимизация позволяют освоить на практике только основы ТАУ, приобрести и закрепить навыки построения, анализа и синтеза моделей линейных САР в современной программе моделирования МВТУ.
Программный комплекс «МВТУ» разработан в МГТУ им. Н.Э.Баумана коллективом авторов под руководством доцента О.С. Козлова и предназначен для моделирования и исследований проектируемых и действующих систем и объектов. Комплекс позволяет моделировать объекты широкого спектра сложности: от простейших элементов систем управления до систем управления ядерными реакторами, для чего собственно он и создавался.