

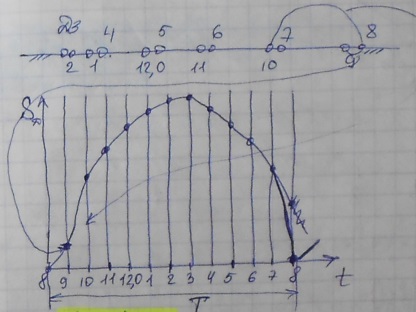
9. Планы положений механизма.Кинематические диаграммы. Сущность метода графического дифференцирования.
С
помощью плана положений опред. положения
звеньев и траектория движ. точек.
Кинем.диагр.-это график изменения какого
либо кинем.параметра.
 где
где
 -масштаб
плана положений(м/мм),
-масштаб
плана положений(м/мм),
 масштаб
диогр.перемещений(м/мм), m-безразмерный
коэффициент.
масштаб
диогр.перемещений(м/мм), m-безразмерный
коэффициент.
Например,если
расст.откладыв.на диограмме необход.уменьшить
в 2 раза по сравнению с расст. полож.,то
m=2,а
увеличивая в 2 раза – m=0,5.
 По диаграмме перемещений методом
графического дифференцир. строится
диаграмма скоростей.
По диаграмме перемещений методом
графического дифференцир. строится
диаграмма скоростей.
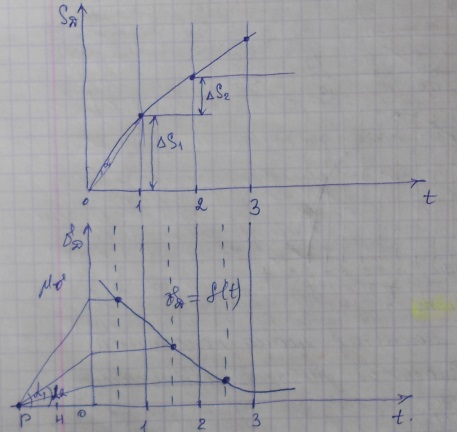
Графическое
диффер.производ.методом хорд.

Масштаб
диаграммы скоростей:
 ;
Масштаб диаграммы ускорений:
;
Масштаб диаграммы ускорений: [
[ ].
].
10.Применение планов скоростей при выполнении кинем. Анализа плоского шарнирно- рычажкового механизма……
Задачи кинематического анализа механизма – определение линейных скоростей и ускорений точек механизма, а также нахождение угловых параметров вращения звеньев заданного механизма.
Положение неподвижной точки D механизма задается от -резком АD либо координатами Х
0,Y0. Точка С находится мето-дом засечек – на пересечении дуг радиусов ВС и СD, проведен -ных , соответственно , из точек В и D. Точка Е располагается на
звене ВС или СD и задается отрезками ВЕ либо СЕ.
Расположение оси направляющих рабочего звена ( ползуна F) задается координатами XF, YF,
указанными в задании на кур-совую работу ; положение точки F можно найти на пересечении
дуги радиуса ЕF с этой осью. Точки S2,S3,S4являются центрами тяжести звеньев ВС, СD, EF и лежат на их середине .
Планы скоростей ( ускорений ) – это совокупность вектор -ных треугольников ( многоугольников), соответствующих урав -нениям скоростей ( ускорений) заданных точек механизма и по-строенных при общей точке, называемой полюсом, или центром .
2.1.1. Определение скоростей
Необходимые расчеты и по-строения производятся в следующем порядке.
1. Находим скорость точки В.
2.Выбираем масштаб построения , а также по-люс ( центр) построения – некоторую произвольную точку р на плоскости листа.
2. Определяем скорость точки С, учитывая, что эта точка вращается вокруг опоры D и в то же время вместе со звеном ВС участвует в плоскопараллельном движении , где точка В явля -ется мгновенным центром скоростей ( мцс ) . Как известно , в этом случае скорость точки С определяется векторным уравнени -ем . В этом уравнении известна скорость точки В . Из плана скоростей находим также угловые скорости звень-ев ВС и СD.
3. Скорость точки Е находим , пользуясь свойством про -порциональности планов скоростей : любой точке на звене ме-ханизма соответствует на плане скоростей аналогичная точка,
положение которой определяется пропорциональностью соответ-ствующих отрезков . Соединив точку е с центром построения р , найдем вектор скорости
4. Скорость точки F ( ползуна) определяется векторным уравнением.Для каждого из двенадцати положений механизма, то есть необ -ходимо построить двенадцать планов скоростей. Значения абсо -лютных скоростей точек , а также относительных ско-ростей
Примеры любой пример из расчетки……..
11.Применение планов ускорений при выполнении кинематического анализа плоского шарнирно-рычажного механизма. Методика построения плана ускорений и определение соответствующих кинематических параметров. Привести пример.
ПУ позволяет определить ускорения всех звеньев, линейные ускорения всех точек механизма для данного положения. При рассмотрении плоского шарнирно-рычажного механизма, для построения плана используют плоско-параллельное движение(ППД).В соответствии с теорией ППД сложное движение звена может быть представлено как комбинация 2ух простых движений:
1) вращательное движение относительно полюса звена
2) Поступательное движение вместе с полюсом звена.
В качестве полюса звена выбирается та точка на звене, КП которой известны.
Главная особенность ПУ – это наличие нормальных составляющих векторов уравнений.
Методика построения плана ускорений:
1. Строится план механизма в выбранном масштабе длин.
2. Составляются векторные уравнения ускорений отдельных точек, принадлежащих звеньям механизма.
3.
Выбираем масштаб плана ускорений: ,
![]()
![]()
4.
Тогда ускорение будет изображаться на
плане ускорений вектором, имеющим длину![]() мм, а ускорение
мм, а ускорение
![]() – вектором длиной
– вектором длиной![]()
5.Затем строится план ускорений с использованием составленных векторных уравнений ускорений. Из произвольно выбранного полюса Ра параллельно отрезку ОА плана механизма проводится вектор ускорения , длина которого Раа′ была выбрана произвольно при расчете масштаба . Из конца этого вектора (точки а′) проводится вектор ускорения длиной а′n2, который должен быть параллелен отрезку АВ плана механизма и направлен от точки В к точке А. Перпендикулярно ему через точку n2 проводят прямую. Затем из полюса Ра проводят вектор ускорения длиной Раn3. Перпендикулярно ему через точку n3 проводят прямую до пересечения с прямой, проведенной через точку n2 перпендикулярно отрезку АВ. Точка пересечения обозначается буквой b′, которая, будучи соединена с полюсом Ра, образует отрезок Раb′, изображающий вектор полного ускорения точки В.
В результате кинематического анализа определяются зависимости выходных кинематических параметров. Графическое изображение этих зависимостей называют кинематическими диаграммами.
Пример уже начертите сами (стандартный из РГР).