

1.Основные задачи и понятия ТММ. Машина, механизм, их классификация.
2.Структура механизмов. Деталь, звено, кинематическая пара, кинематическая цепь…
3.Классификация кинематических пар по характеру соприкосновения звеньев….
4. Классификация кинематических пар по числу условий связи.
5.Структурная формула кинематической цепи общего вида. (Сомова-Малышева)
6.Структурная формула плоских механизмов (Чебышева).
7.Классификация плоских механизмов по Ассуру. Группы Ассура, их классификация.
8.Кинематический анализ механизмов, его основные задачи и методы.
9.Планы положений механизма. Кинематические диаграммы.
10.Применение планов скоростей при выполнении кинематического анализа плоского шарнирно-рычажного механизма.
11. Применение планов ускорений при выполнении кинематического анализа плоского шарнирно-рычажного механизма.
12.Динамический анализ механизмов, его основные задачи.
13.Уравновешивающая сила.
14.Основные режимы работы механизма.
Неравномерность хода механизмов в установившемся движении
Приведенная масса.Приведенный момент инерции массы
Определение величины момента инерции маховика
Уравнение движения машины,его использование в дин.анализе
Методика построения и использования диаграмм приве.моментов
Применение принципа д’Аламбера в динамике машин
Методика определения уравновешивающей силы
Схема,название звеньев,структур.анализ кулачкового мех-ма
Схема,название звеньев,структур.анализ кулисного мех-ма
Схема,название звеньев,структур.анализ кривошипно-ползунного мех-ма
Схема,название звеньев,структур.анализ кривошипно-коромыслоового мех-ма
Синтез механизмов,его задачи.Теорема теории зацепления
Методика построения эвольвентного профиля зубьев
Геом. элементы зубчатых колес.Шаг,модуль зацепления
1.Основные задачи и понятия тмм. Машина, механизм, кп, кц, их классификация
ТММ- наука изучающая структуру, кинематику и динамику мех-ов и машин.
Осн. Задачи:
1) Синтез мех-ов - проектирование механизмов, обладающих заданными св-ми.
2)Анализ мех-ов – исслед-ие и структурных, кинетических и динамических свойств.
Машина – созданное человеком устройство, выполняющее мех-ие движения для целесообразного преобретения энергии материалов и информации.
Классиф-ия машин:
1)Энергетические 2) рабочие 3) информационные
Механизм – система тел предназначенная для преобразования движений одних тел в требуемые движения других.
2.Структура механизмов. Деталь, звено, кинематическая пара, кинематическая цепь, их классификация.
Механизмы состоят из отдельных тел(деталей).
Деталь – часть механизма, изготавливаемая без применения сборочных операций.
Каждая подвижная деталь механизма или группа подвижных деталей жёстко соединённых между собой называется подвижным звеном.
Подвижное соединение звеньев ограничивающее их относительное перемещение называется кинематической парой(КП).
Система звеньев соединённых между собой КП называется кинематической цепью.
Любой механизм представляет замкнутую кинематическую цепь. В любом механизме различают: ведущие, ведомое и промежуточные звенья.
К ведущему присоединяют двигатель, который обеспечивает движение механизма. Ведомое звено для обеспечения требуемого движения, которое и создаёт весь механизм. Промежуточные звенья, обеспечивают, требуемы характер ведомого звена.
3.Классификация кинематических пар по характеру соприкосновения
По характеру соприкосновения звеньев КП делят на:
Высшие
Низшие
Н изшие
происходят по плоскости или поверхности.
изшие
происходят по плоскости или поверхности.




Высшие происходят по линии или в точке.














Лучшей работоспособностью обладают низшие кинематические пары по след. причинам:
Нагрузка передаётся на большую площадь
Низшие пары меньше подвержены износу
Имеют лучшие условия смазки, легко создаётся масляный клин
4 Классификация кинематических пар по числу условий связей
Всякое свободно движущееся в пространстве тело может совершить 6 независимых движений
Вхождение тела (звена) в КП налагает на него условия связей, т.е. независимость наложения некоторых из 6-ти независимых движений. Н - число степеней свободы Н=6, S – условие связи H=6-S
S = 1-5, 1≤S≤5
Если Н=6, то S=0 → свободное тело
Если S =6, то Н=0 → жёсткое неподвижное соединение
Различают пары 5-ти классов:
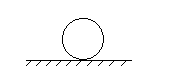
S=1, Н=5 – Это пара «шар и плоскость»
S=2, Н=4 – Это пара «шар и цилиндр»
![]()
S=3, Н=3 3.1) сферическая пара
![]()
3.2) плоскостная пара

S=4, Н=2 – Цилиндрическая пара

S=5, Н=1 Винт-гайка


