

6.3. Решение уравнений движения машины
Система дифференциальных уравнений движения содержит две неизвестные функции времени закон движения входного звена исполнительного механизма q(t) и движущий момент Q(t). Для отыскания стационарного решения этих уравнений обычно пользуются методом последовательных приближений. В данной курсовой работе используется ранее полученное решение.
Внутренняя виброактивность. Нахождение возмущающего момента.
Возмущающий момент – характеризует возмущение, вызывающее отклонение закона движения входного звена (кривошипа) от программного (равномерного) вращения, также характеризует внутреннюю виброактивность исполнительного механизма:
 ,
,
где:
Далее производится разложение возмущающего момента на программном движении q = ω0 в ряд Фурье с точностью до пяти гармоник:
 ,
,
где:
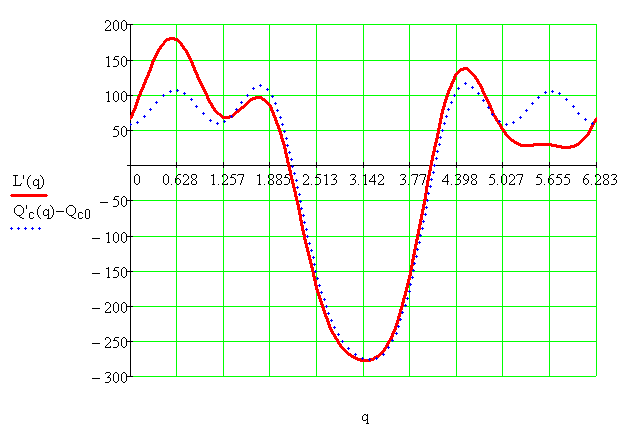
Рис. 6.5. Совмещённый график возмущающего момента и переменной части приведенного момента сил сопротивления, разложенного в ряд Фурье
Далее ищется динамическая ошибка по углу с точностью до пяти гармоник:
 ,
,
где:
 - механичская постоянная
времени машины.
- механичская постоянная
времени машины.
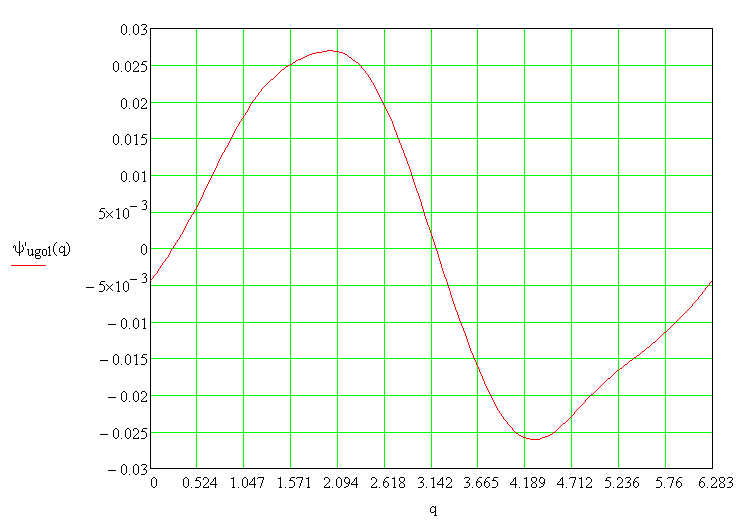
Рис. 6.6. Динамическая ошибка по углу
Нахождение динамической ошибки по скорости:
 ,
,
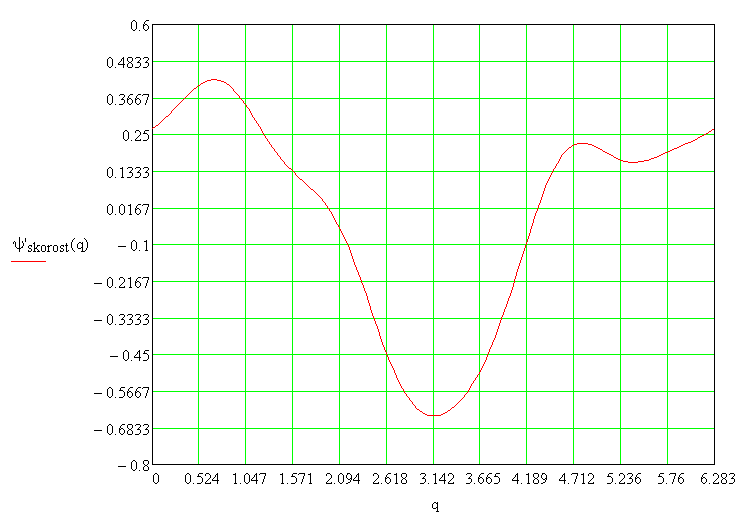
Рис.6.7. Динамическая ошибка по скорости
В технических требованиях к машине часто задаются допустимые значения максимальных динамических ошибок, оцениваемые коэффициентами неравномерности вращения входного звена:
 ,
,
где:
![]()
Рассчитанный коэффициент неравномерности вращения входного звена не превышает допустимого значения 0,04.
Далее находится переменная часть движущего момента с точностью до пяти гармоник:
 ,
,
где:
Тогда закон изменения движущего момента при учете механической
характеристики двигателя с точностью до пяти гармоник определяется по формуле:
![]() ,
,
где:
![]()
График движущего момента, полученного в динамическом исследовании представлен на Рис. 6.8.
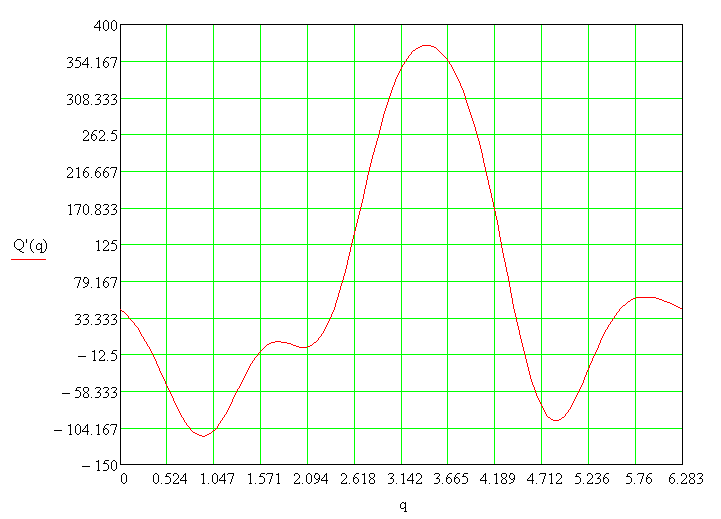
Рис. 6.8. График движущего момента, полученного при динамическом исследовании
6.4. Построение динамических нагрузок машины
Важной динамической характеристикой установившегося движения являются динамические нагрузки в передаточном механизма. Их можно определить из уравнения вращательного движения ротора двигателя.
Крутящий момент в приводе определяется с точностью до пяти гармоник:
 ,
,
где:
 - механическая постоянная
привода;
- механическая постоянная
привода;
![]() -
момент инерции ротора двигателя и
передаточного механизма, приведенный
к входному звену.
-
момент инерции ротора двигателя и
передаточного механизма, приведенный
к входному звену.
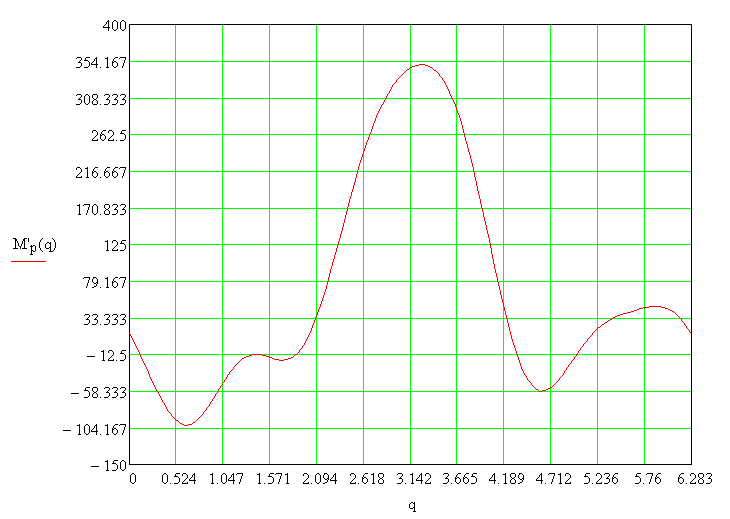
Рис. 6.9. Крутящий момент в приводе
6.5. Улучшение показателей качества машины
Основное требование конструирования: знакопостоянство крутящего момента, обеспечивающее отсутствие перекладки зазоров в зубчатых передачах редуктора. Этот момент, который действует на редуктор и приведен к выходному валу редуктора. Нарушение данного условия ведет к увеличению ударной нагрузки на зубья и быстрому износу передачи.
В машине, рассматриваемой в курсовом проекте, произошла перекладка зазоров. Существует несколько способов обеспечения знакопостоянства крутящего момента:
Увеличение среднего значения приведённого момента инерции, что обеспечивается установкой маховика;
Увеличение среднего значения приведённого момента сил сопротивления, что достигается установкой тормозного устройства;
Установка динамического гасителя или разгружателя, и т.д.
В данном случае был выбран наиболее рациональный метод – увеличение среднего значения приведённого момента инерции путём установки маховика.
Осевой момент инерции маховика был подобран эмпирическим путём:
![]()
Вычисление параметров маховика:
![]() - радиус маховика;
- радиус маховика;
![]() -диаметр маховика;
-диаметр маховика;
![]() -
масса маховика.
-
масса маховика.
Другим показателм качества машины является характер разбега.
Разбег с учётом динамической характеристики двигателя описывается частным решением уравнения:
![]() ,
,
соответствующим определённым начальным условиям:
Сначала составляется характеристичекое уравнение:
![]()
Корни характеристическогоуравнения:

Рассматриваемый механизм будет иметь разбег ввиде затухаюзщего колебательного процесса, поскольку:
![]()
В этом случае угловая скорость будет изменяться по следующему закону:
 ,
,
где:
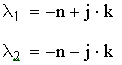
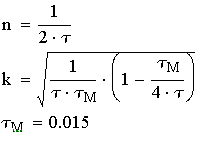
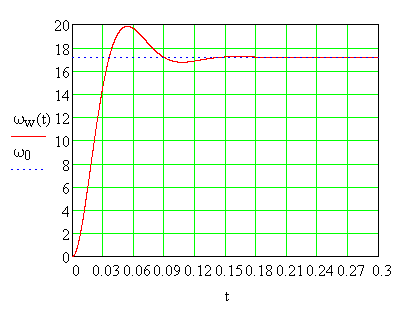
Рис. 6.10. Изменение угловой скорости за время разбега при колебательном процессе
Время разбега tр=0,18с.
Однако следует стремиться к тому, чтобы разбег был апереодическим процессом. Для этого можно поставить дополнительный маховик, тем самым увеличив механическую постоянную времени.
Параметры подобранного маховика:
![]()
![]()
Функция угловой скорости в этом случае имеет вид:
![]() ,
,
где:
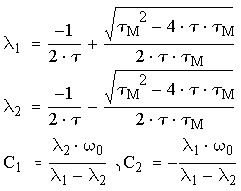
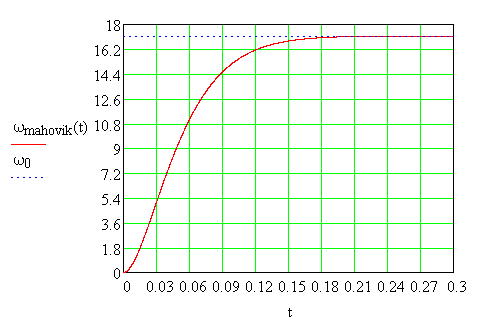
Рис. 6.11. Изменение угловой скорости за время разбега при апериодическом процессе
При этом время разбега увеличивается tp=0,21с, но это значение невелико, поэтому является пиемлемым.