

5.3. Составление уравнений кинетостатики
Кинетостатический анализ начинается с последней группы.
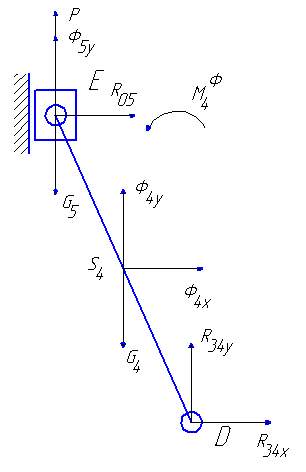
Рис.5.1. Группа ВВП
Уравнения равновесия:
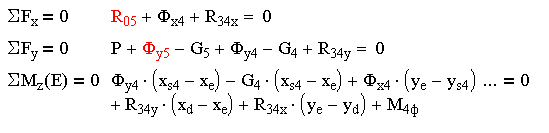
Учитывается, что:
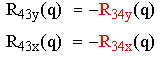
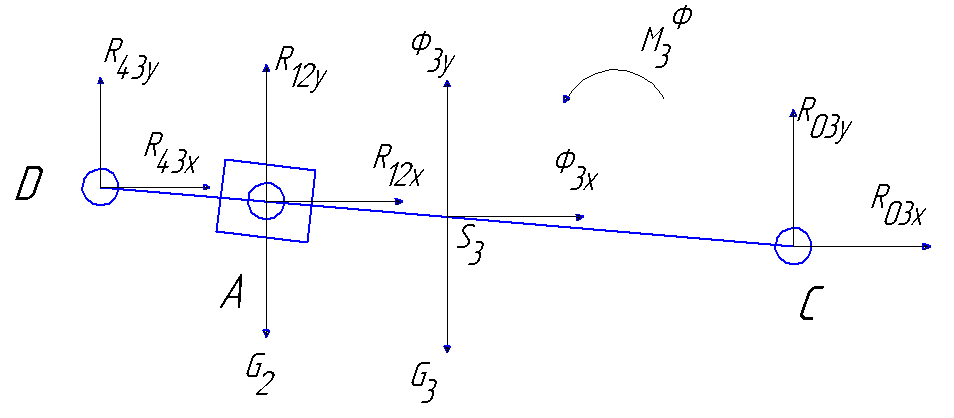
Рис.5.2. Группа ВПВ
Уравнения равновесия:
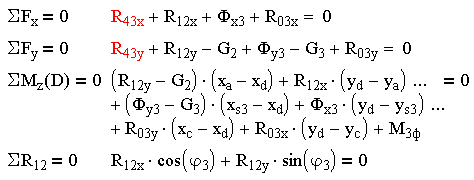
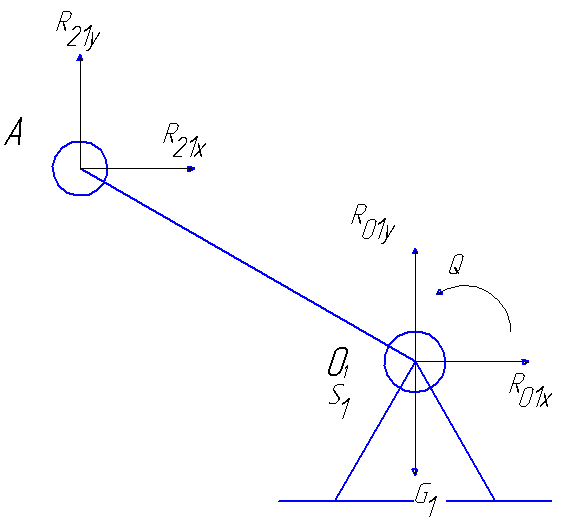
Рис.5.3. Кривошип
Уравнения равновесия:

Также учитывается, что
![]()
![]()
5.4. Решение урвнений кинетостатики
Аналитическое решение уравнений кинетостатики производится методом Крамера.
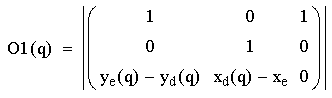
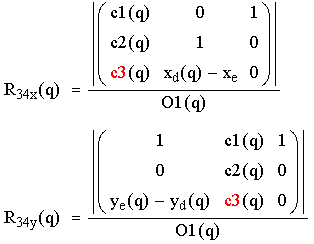
1)Нахождение неизвестных R05, R34x, R34y.
Определитель системы:
Свободные члены системы:

Нахождение неизвестных:
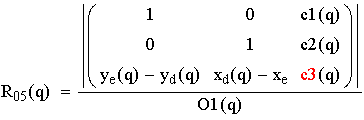
Полная реакция:
![]()
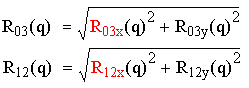
2)Нахождение неизвестных R03х, R03у, R12x, R12y.
Определитель системы:
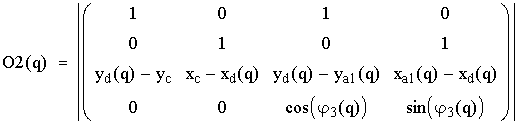
Свободные члены системы:
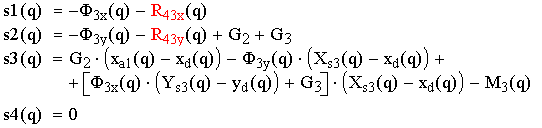
Нахождение неизвестных:
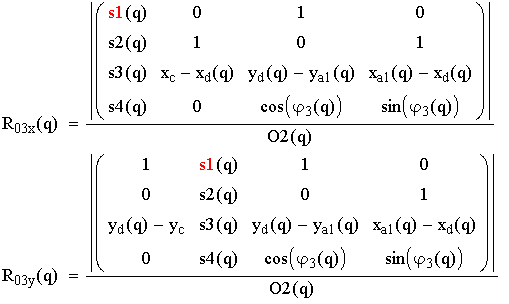
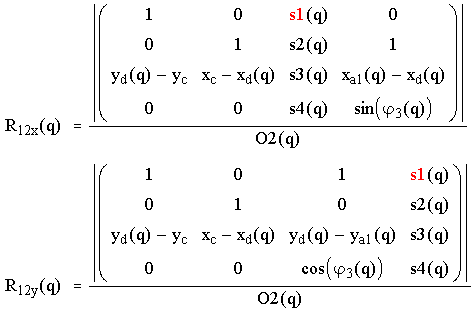
Полные реакции:
3)Нахождение неизвестных R01х, R01у, Q.
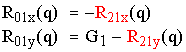
Полная реакция:
![]()
Обобщённая движущая сила
![]()
5.5. Определение движущего момента с помощью общего уравнения динамики (роверочный расчёт)
Проверка аналитического решения производится составлением уравнения Д’Аламбера-Лагранжа.
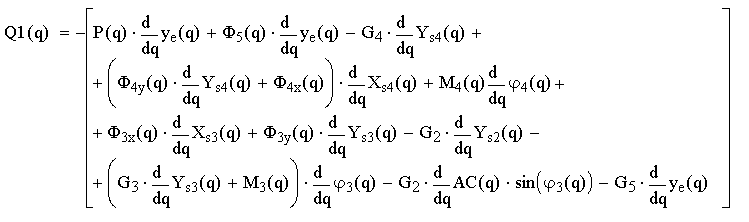
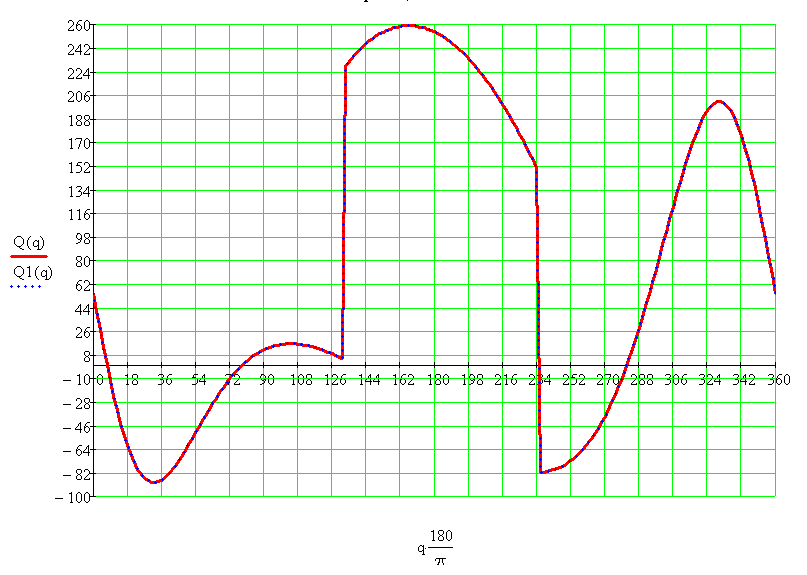
Рис.5.4. График зависимости обобщённой движущей силы от обобщённой координаты
5.6. Графическое решение уравнений кинетостатики
Графоаналитический способ силового расчёта включает в себя построение плана сил для каждой группы, начиная с последней. Для каждой группы составляется векторное уравнение равновесия приложенных к ней сил и на основе анализа направления каждого вектора строится план сил.
Крайняя группа.
![]()
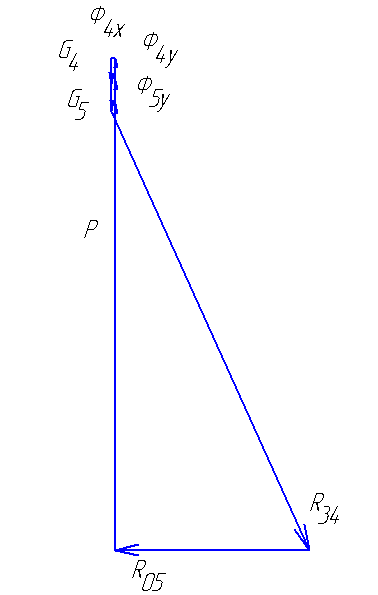
Рис.5.5. План сил для крайней группы
Предпоследняя группа
![]()
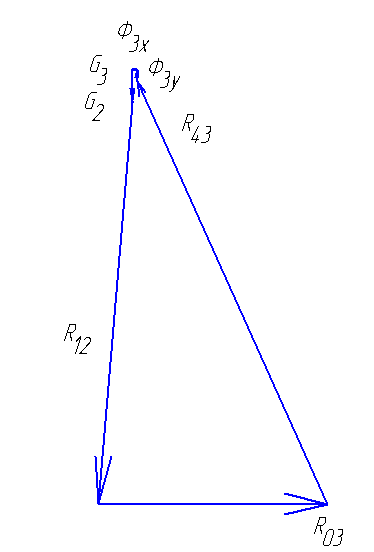
Рис.5.6. План сил для предпоследней группы
Первая группа
![]()
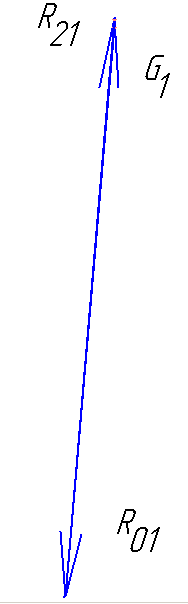
Рис.5.7. План сил для первой группы
Сравнение резуьтатов расчётов разными методами представлен в таблце 5.1:
Таблица 5.1
Реакции |
Графический метод, Н |
Аналитический метод, Н |
Погрешность, % |
|
3770.74 |
3771.22 |
1,6∙10-4 |
|
-1519.35 |
-1519.56 |
4∙10-4 |
|
3230.21 |
3230.21 |
0 |
|
1862.09 |
1862.09 |
0 |
|
3271.74 |
3271.74 |
0 |
5.7. Выбор двигателя
Для разрабатываемой машины предполагается использование электрического двигателя постоянного тока независимого возбуждения. Такой двигатель имеет статическую характеристику, что упрощает динамические расчёты.
При подборе двигателя используется среднеквадратичное значение мощности:

По потребной мощности выбирается двигатель 2ПН112М с характеристиками:
Нахождение номинального момента на двигателе:
 ,
,
где:
![]()
Нахождение максимального момента на двгателе:
![]() ,
,
где:
2 – коэффициент перегрузки.
Проверка:

Полученное значение больше, чем Qmax, значит выбранный двигатель подходит.
Определение параметров двигателя.
Число оборотов в минуту на холостом ходу
 ,
об/мин
,
об/мин
Электромагнитная постоянная времени
![]() ,
с
,
с
Крутизна статической характкристики двигателя
 ,
Н∙м∙с
,
Н∙м∙с
Передаточное число редуктора
![]()
5.8. Выбор передаточного механизма
Исходя из полученного передаточного отноения выбирается передаточный механизмм. На рисунке 5.8. представена схема планетарной передачи 2К-Н:
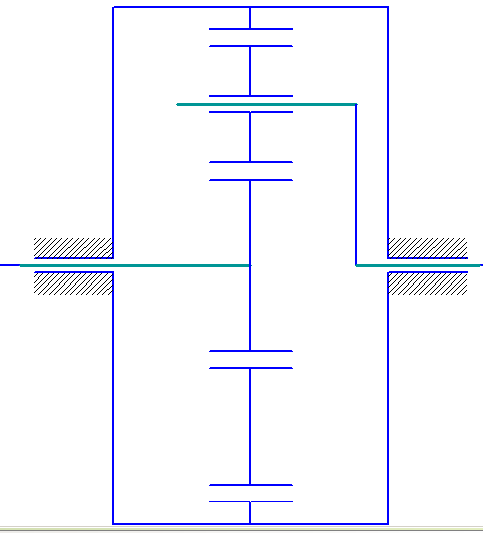
Рис.5.8. Схема передаточного механизма