

Сравнительный анализ механизмов по критериям качества
Прототипы сравниваются по следующим критериям:
• Габариты (механизм не должен быть слишком большим);
• Величина хода выходного звена (H);
• К1 – максимум передаточной функции первого порядка, отнесенный к длине кривошипа. Этот критерий характеризует внешние условия передачи сил и показывает соотношение между движущей силой на входе механизма и рабочей нагрузкой на выходе (при условии, что звенья не имеют массы). Поскольку выходное звено совершает возвратно-поступательное движение, критерий К1 численно равен максимуму аналога скорости точки приложения рабочей нагрузки, отнесенному к длине входного звена. В общем случае допускаемые значения критерия обычно принимают К1 < 3;
• К2 – критерий, характеризующий условия передачи сил в центральной кинематической паре выходной диады. Он может быть использован во всех механизмах, где центральной парой выходной диады является вращательная КП. Он равен отношению силы R в указанном шарнире к рабочей нагрузке P;
• КV – коэффициент изменения средней скорости.
Определение коэффициента изменения средней скорости Kv.
Прототип №1:
 ,
,
где:
![]() ,
,
Прототип №2:
 ,
,
где:
![]() ,
,
В таблице 4.3. представлено сравнение характеристик двух прототипов.
Таблица 4.3.
№ |
H, м |
Kv |
габариты, х, м |
габариты, у, м |
К1 |
К2 |
1 |
0.199 |
1.29 |
0.840 |
0.680 |
0.925 |
ВВВ=186 ВВП=1.543 |
2 |
0.200 |
1.24 |
0.985 |
0.660 |
1.5 |
ВПВ=1 ВВП=1.1 |
Исходя из поставленных требований выбирается второй протип, как более подхлдящий.
Выводы
На основании сравнительного анализа двух прототипов исполнительного механизма по геометрическим и кинематическим параметрам, можно сделать выбор прототипа. Для дальнейших расчетов принимается в рассмаотрение прототип 2. Также были рассмотрены два метода кинематического анализа, расхождение полученных результатов не превышает 0.07%.
5. Силовой расчёт исполнительного механизма
5.1. Задачи силового расчёта механизмов
Задачей кинетостатического расчета механизма является определение реакций в кинематических парах и движущего момента Q с учетом сил инерции подвижных звеньев.
Значения реакций в кинематических парах необходимы для расчета деталей на жесткость и прочность. Реакции определяются в положении, в котором действует максимальная нагрузка.
Движущий момент необходимо опредлить для выбора двигателя механизма. Двигатель выбирается по максимальному движущему моменту и мощности. Движущий момент – тот момент, который необходимо приложить к кривошипу, для того чтобы вращать его с заданной постоянной скоростью при заданных рабочей нагрузке, силах тяжести и силах инерции.
Также необходимо оценить внутреннюю и внешнюю виброактивности механизма. Внешняя виброактивность определяется по главному вектору сил инерции. Ее можно уменьшить с помощью установки противовеса.
5.2. Определение рабочей нагрузки, сил тяжести, сил инерции
1. Вычисление масс звеньев, входящих в механизм.
Массы рассчитываются по формуле:
![]() [кг] (5.1)
[кг] (5.1)
где
μ = 50 кг/м – погонная масса;
![]() длина
звена.
длина
звена.
Для кривошипа, шатуна и кулисы:
Для ползуна:
![]()
Для камня кулисы:
![]()
2. Вычисление сил тяжести.
Силы тяжести, действующие на каждое звено, вычисляются по формуле:
![]() [Н]
(5.2) где
[Н]
(5.2) где
![]() ускорение
свободного падения, м/с2
ускорение
свободного падения, м/с2
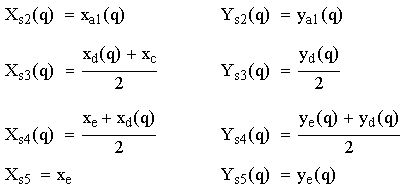
3. Определение координат центров тяжести звеньев.
Допущение: массы распределены в звеньях равномерно, центры тяжести находятся посередине звеньев.
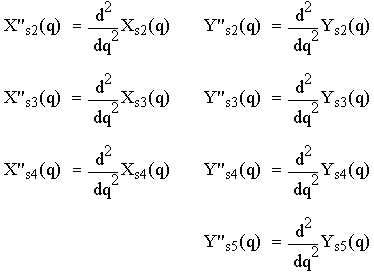
4. Определение ускорений центров тяжести звеньев.
5. Силы инерции, действующие на подвижнве звенья.
Полные выражения для сил инерции:
6. Выражения для осевых моментов инерции и моментов сил инерции.

7. Задание рабочей нагрузки.
При задании рабочей нагрузки необходимо учитывать следующие условия:
Мощность выходного звена должна быть отрицательна (т.е. знак рабочей нагрузки должен быть противоположен скорости выходного звена (в данном случае ползуна, 5-го звена)).
По заданию во время холостого хода нагрузка должна быть - 0 (Н), во время рабочего хода – 3500 (Н).
Программа для определения и построения зависимости P(q):
где
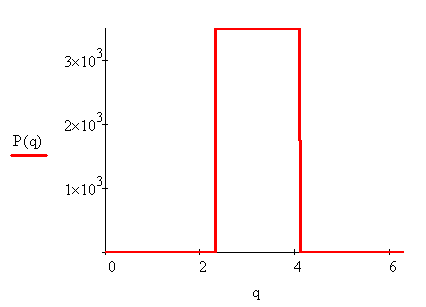
Рис.5.2. График зависимости рабочей нагрузки от обобщённой координаты для звена 5
На основе анализа построенных зависимостей видно, что учтены все требования к рабочей нагрузке.