

Оглавление
Введение 3
1. Синтез рычажного механизма 3
2. Структурный анализ механизмов 5
3. Геометрический анализ механизмов 8
4. Кинематический анализ механизмов 14
5. Силовой расчёт исполнительного механизма 25
6. Динамическое исследование машинного агрегата 41
7. Вывод 55
Список литературы: 55
Введение
Постановка задачи
В данной курсовой работе необходимо выбрать и обосновать кинематическую схему зубодолбёжного станка, предназначенного для нарезания цилиндрических зубчатых колёс методом обкатки. По результатам кинематического расчёта следует выбрать один прототип.
Для выбранного прототипа необходимо произвести:
• Силовой расчёт; нахождение обобщённой движущей силы двумя способами и проверка; сравнение реакций, полученных разными методами;
• Определение динамических нагрузок и оценку виброактивности механизма;
• Выбрать двигатель;
• Произвести оценку внешней виброактивности механизма;
• Динамическое исследование (определение внутренней виброактивности, динамических ошибок, динамических нагрузок);
• Улучшение качества показателей машины (при помощи установки маховика, тормозов, динамических гасителей).
Техническое задание
Необходимо разработать исполнительный механизм зубодолбёжного станка, предназначенного для нарезания цилиндрических зубчатых колёс методом обкатки. Долбяк совершает возвратно-поступательное движение.
Исходные параметры создаваемого механизма:
Длина нарезаемого зуба колеса 0,14м
Коэффициент изменения средней скорости Кv 1,2
Число оборотов кривошипа n1 160об/мин
Максимальная сила резания Pc 3,5кН
Перебег резца lп 0,03м
Описание работы машины
Зубодолбёжный станок представляет собой механизм, в котором вращательное движение двигателя посредством передаточного механизма и плоского рычажного механизма преобразуется в вертикальное возвратно-поступательное движение выходного звена – рабочего органа с закреплённым на нём режущим инструментом.
Синтез рычажного механизма
Прототипы исполнительного механизма
Для обеспечения заданного движения станка были подобраны два прототипа.
Прототип №1
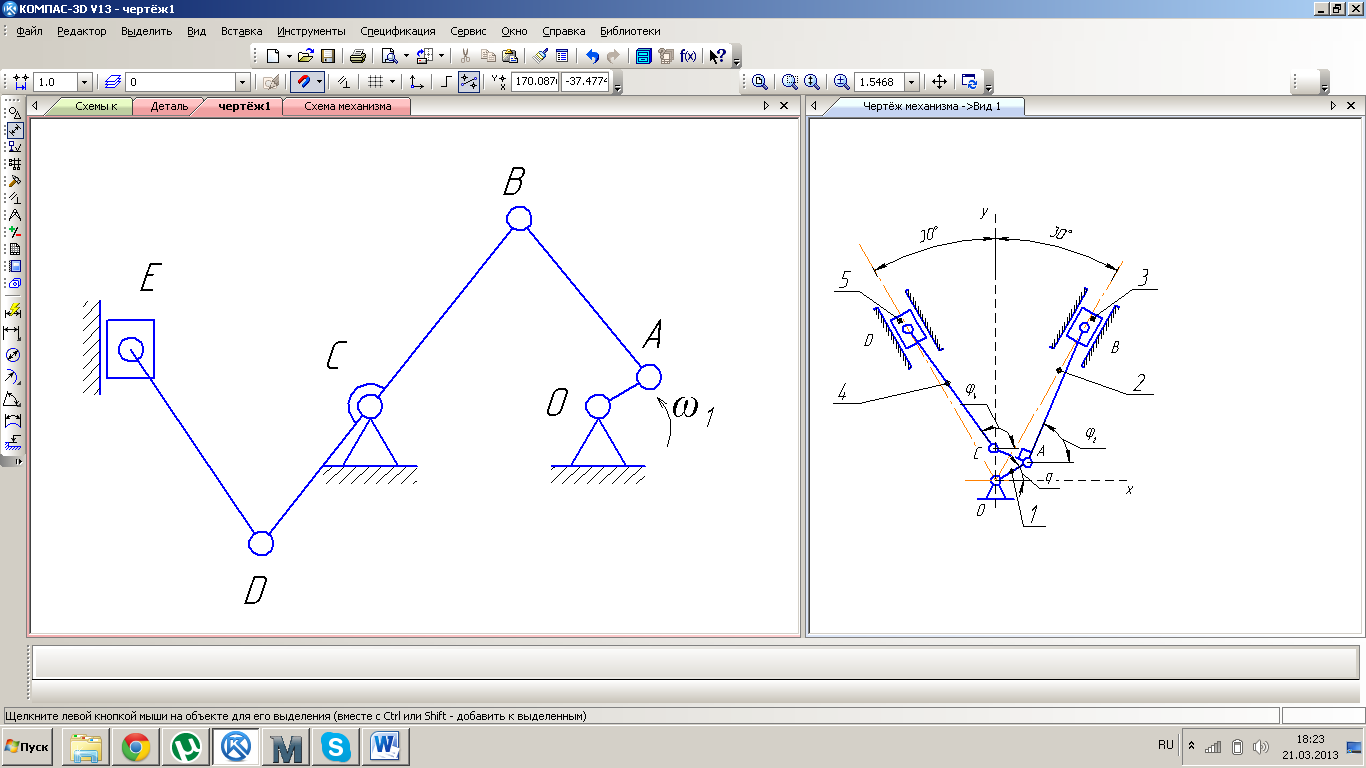
Рис.1.1. Схема прототипа №1
Для прототипа были подобраны оптимальные длины звеньев и их расположение:
OA = 0,1м
АВ = 0,35м
ВС = 0,4м
CD = 0,3м
DE = 0,4м
Xc = – 0,39м
Хе = – 0,8м
Прототип №2
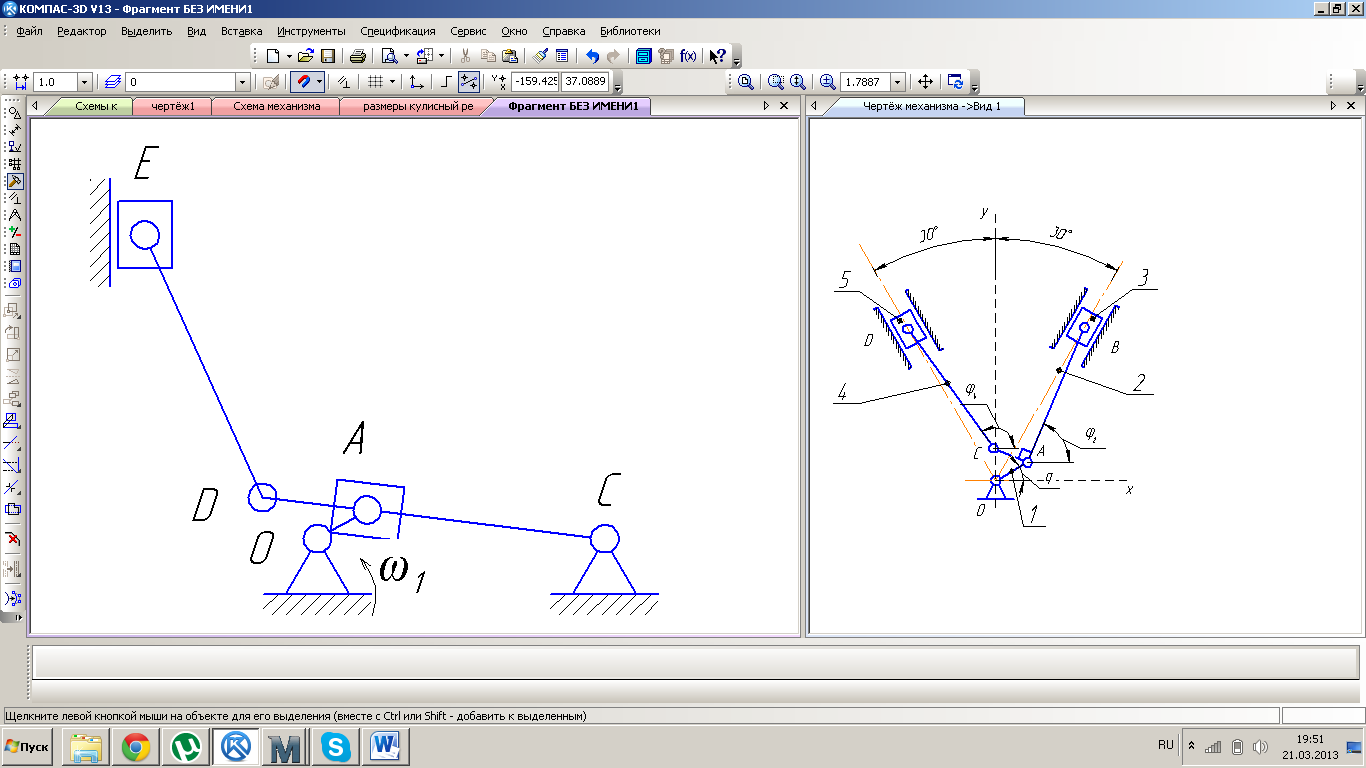
Рис.1.2. Схема прототипа №2
Для прототипа были подобраны оптимальные длины звеньев и их расположение:
OA = 0,085м
CD = 0,51м
DE = 0,425м
Xc = 0,425м
Хе = – 0,8м
Структурный анализ механизмов
Задачи структурного анализа механизма
Задачей структурного анализа механизма является определение количества звеньев и кинематических пар, классификация кинематических пар, определение их подвижности и степени подвижности механизма, а также выделение в нем структурных групп – кинематических цепей, у которых число входов совпадает с числом степеней подвижности.
Структурный анализ механизма прототипа №1
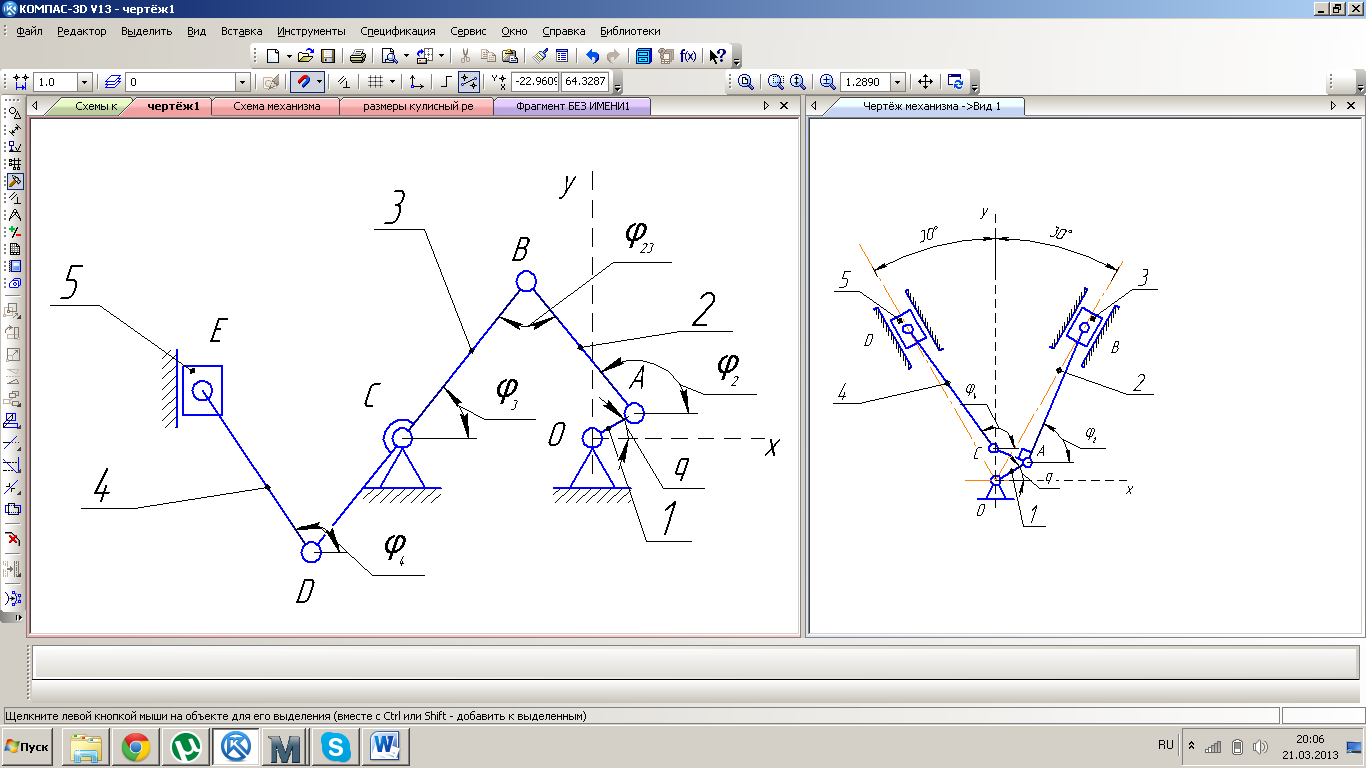
Рис.2.1. Структурная схема прототипа №1
Состав механизма.
Механизм состоит из шести звеньев:
0 – стойка и направляющие – неподвижное звено;
1 – кривошип, совершающий вращение вокруг неподвижной оси;
2,4 – шатуны, совершающие плоское движение;
3 – коромысло, совершающее качательное движение;
5 – ползун, совершающий возвратно-поступательное движение.
Количество подвижных звеньев N = 5.
Количество входов n = 1.
Число степеней подвижности.
Число степеней подвижности Wп определяется по формуле Чебышёва (3.1):
![]() (3.1)
(3.1)
![]()
где:
N=5 – число подвижных звеньев механизма;
pН=7 – число низших кинематических пар;
рВ=0 – число высших кинематических пар.
Таким образом, рассматриваемый механизм нормальный, поскольку число входов совпадает с числом степеней подвижности (Wп=n), что позволяет провести геометрический анализ.
Граф механизма, выявление структурных групп и граф структуры.
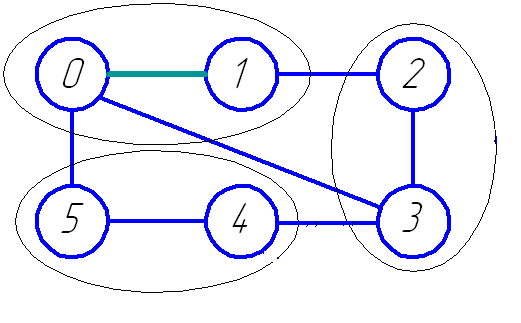
Рис.2.2. Граф механизма
В ходе анализа механизм был разбит на структурные группы. Граф структуры изображён на рисунке 2.3.
Рис.2.3. Граф структуры
Выявлено 3 структурные группы:
0-1 – однозвенная одноподвижная группа;
2-3 – ВВВ, двухзвенная 0-подвижная группа;
4-5 – ВВП, двухзвенная 0-подвижная группа.