БОУ ОО СПО Омский промышленно экономический колледж
Курсовая работа
По дисциплине: Автоматическое управление
На тему: Анализ системы автоматического регулирования копировально-фрезерным станком
КР.220301.059.005.ПЗ
Выполнил студент
группы ТЭМ-59
Климов А.С.
Проверил преподаватель автоматического управления Лазаренко И.В.
Омск
2012
Аннотация
Анализ системы автоматического регулирования копировально-фрезерным станком. Автор. Климов Артем Сергеевич электромеханическое отделение 3 курс группа ТЭМ-59 2012 год. В пояснительную записку входят разделы с 1-го по 5-ый: 1. составление математической модели системы регулирования; 2. построение амплитудно- фазо- частотной характеристики; 3. построение логарифмических характеристик системы; 4. исследование устойчивости системы; 5. определение точности системы и ее качества. В записку так же входит один чертеж формата А4, одиннадцать рисунков. Информация была взята из трёх источников указанных в библиографическом списке.
 Содержание
Содержание
Введение
Составление математической модели системы регулирование
Нахождение передаточных функций элементов системы………… 4
Составление структурной схемы…………………………………… 7
Получение передаточной функции системы……………………… 8
Введение структурной схемы в МВТУ…………………………… 10
Построение амплитуда фазо частотных характеристик……………… 12
Построение логарифмических характеристик системы
Построение асимптотической логарифмической амплитудной……. характеристики (далее ЛАХ) и логарифмической фазной…………… характеристики (далее ЛФХ)
Построение ЛАХ и ЛФХ при помощи программы МВТУ……… 14
Исследование устойчивости системы
Исследование системы по критерию Гурвица…………………… 15
Исследование системы по критерию Найквиста………………… 16
Исследование системы по критерию Михайлова………………… 17
Определение точности системы и ее качества
Определение установившейся ошибки………………………… 18
Определение качества по графику переходного процесса
Определение запаса по фазе и амплитуде ……………………… 19
 Введение
Введение
Темой данной курсовой работы является анализ системы автоматического регулирования копировально-фрезерным станком. Актуальность заключается в возможности использования полученных результатов для решения задач автоматизации.
Целью работы является получение практических навыков по анализу САУ. Задачами работы являются:
Написать уравнения, передаточные функции элементов. Составить структурную схему. Определить передаточные функции разомкнуто, замкнутой системы, передаточную функцию по ошибке.
Построить частотные характеристики (АЧХ, ФЧХ) системы, ЛАЧХ разомкнутой системы, переходную характеристику.
Исследовать систему на устойчивость. Определить запасы устойчивости.
Определить коэффициенты ошибок. Найти установившуюся ошибку X(t) при функции входного сигнала xвх(t) = 1; t ; t2.
Определить показатели качества (время регулирования, перерегулирования, колебательность переходного процесса).

 Составление
математической модели системы
регулирования.
Составление
математической модели системы
регулирования.Нахождение передаточных функций элементов
ИМ(электромашинный усилитель) из дифференциального уравнения элемента
![]()
(1)
где Ua – выходная величина
UB – входная величина
С помощью преобразований Лапласа найдём передаточную функцию электромашинного усилителя
![]() (2)
(2)
Выполним преобразование
![]()
![]()
![]()
и подставим в (1)
![]() (3)
(3)
Вынесем Y за скобку
![]() (4)
(4)
Найдём Y из (4)
![]() (5)
(5)
Подставим из (5) в (2) для нахождения передаточной функции электромашинного усилителя
(6) Подставим числовые значения из задания в (6)
![]()
(7)
ОБ (электродвигатель переменного тока) из дифференциального уравнения элемента
![]()
(8)
Где
![]() -
выходная величина
-
выходная величина
![]() -
входная величина
-
входная величина
С помощью преобразований Лапласа найдём передаточную функцию электромашинного усилителя
(2)
Выполним преобразование
![]()
![]()
и подставим в (8)
![]() (9)
(9)

Вынесем Y за скобку
![]() (10)
(10)
Найдём Y из (10)
![]() (11)
(11)
Подставим из (11) в (2) для нахождения передаточной функции электродвигатель переменного тока
(12)
Подставим числовые значения из задания в (12)
![]()
(13)
 Д
(индуктивный датчик) из дифференциального
уравнения элемента
Д
(индуктивный датчик) из дифференциального
уравнения элемента
(14)
где
![]() -
выходная величина
-
выходная величина
![]() - входная величина
- входная величина
С помощью преобразований Лапласа найдём передаточную функцию электромашинного усилителя
(2)
выполним преобразование
![]()
![]()
и подставим в (14)
![]() (15)
(15)
Подставим из (15) в (2) для нахождения передаточной функции индуктивного датчика
![]()
(16)
Подставим числовые значения из задания в (16)
![]()
1.2 Составление структурной схемы
Для составления структурной схемы подставим в функциональную схему (рис.1) элементы с найденными передаточными функциями.
Заменим передаточные функции конкретными значениями

Преобразуем структурную схему к схеме с единичной обратной связью. Для этого воспользуемся правилом переноса входного воздействия с выхода элемента на его вход (рис. 4).
Получением задающего воздействия можно пренебречь и передаточную функцию фиктивного звена в системе не учитывать
Подставим в структурную схему (рис. 4) числовые значения

1.3 Получение передаточной функции системы
Для нахождения передаточной функции разомкнутой системы воспользуемся рисунком 5 из него видно, что звенья соединены последовательно и передаточная функция разомкнутой системы найдётся как произведение передаточных функций составных звеньев.
![]()
(18) Подставляем в (18) (6), (12) и (16)
![]() (19)
(19)
После перемножения получим
![]() (20)
(20)
Где
![]()
Структурная схема с передаточной функцией разомкнутой системы представлена на рисунке 6
Подставим числовые значения в (20) и получим
![]() (21)
(21)
Передаточная функция замкнутой системы связана с передаточной функцией разомкнутой системы формулой
![]() (22)
(22)
Подставим (21) в (22)

![]() 23)
23)
 Подставим
числовые значения в (23)
Подставим
числовые значения в (23)
![]() (24)
(24)
Передаточная функция замкнутой системы по ошибке может быть найдена по формуле
![]() (25)
(25)
Подставим (23) в (25)
 (26)
(26)
Подставим в (26) числовые значения
 (27)
(27)
Найдем характеристический полином передаточной функции разомкнутой системы
![]()
![]() (28)
(28)
1.4 Введение структурной схемы в мвту
Д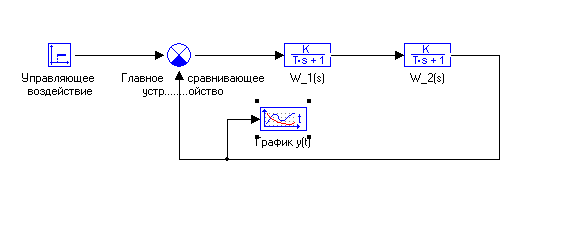 ля
ввода структурной схемы в программу
МВТУ её необходимо преобразовать (рис.
6)
ля
ввода структурной схемы в программу
МВТУ её необходимо преобразовать (рис.
6)
Рис. 6 Структурная
схема
Управляющее воздействие представлено в виде единичной функции. Локальное сравнивающее устройство обеспечивает отрицательную обратную связь, т.е. «работает» в режиме обычного вычитания. W_1(s) – исполнительный механизм и W_2(s) – объект управления представлены типовыми инерционными звеньями с единичной обратной связью. Для отображения результатов расчета использовать типовой блок библиотеки Данные - Временной график
П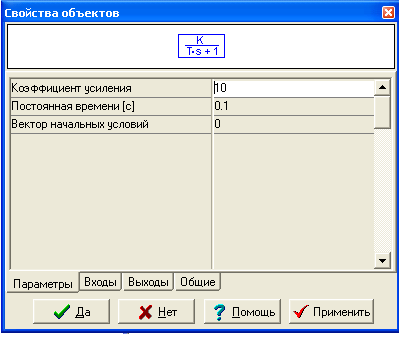 араметры
составных элементов представлены на
рисунке 7
араметры
составных элементов представлены на
рисунке 7
а)
б)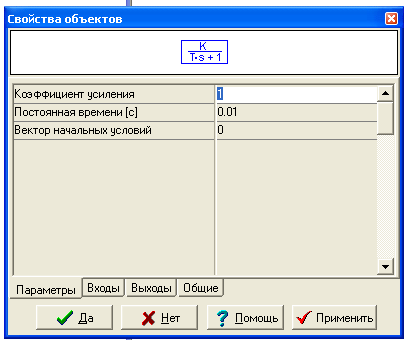
Рис. 7 Параметры
составных элементов
а – W_1(s)
б - W_2(s)
Нажав на панели кнопку «Новый» откроется чистое Схемное Окно. Открыв закладку «Источники входных воздействий» мы инициализировали соответствующую библиотеку типовых блоков. Выбираем блок «Ступенчатое воздействие» и помещаем его в схемное окно. Открыв закладку «Операции математические», выбираем блок «сравнивающее устройство» помещаем его в схемное окно. Открыв закладку «Динамические звенья», инициализируйте ее, перенесите требуемые блоки (апериодические звенья) в Схемное Окно по вышеописанной процедуре приблизительно на желаемые места. Выполним последний перенос блока в Схемное Окно: откроем закладку «Данные» и перенесём блок «Временной график» в схемное окно.
Проведение линий связи на структурной схеме
Переместим курсор на выходной порт любого блока и сделав щелчок левой клавишей «мыши», отпустим клавишу и «протянем» линию связи к верхнему входному порту другого блока. Снова сделайте однократный щелчок левой клавишей: на верхнем входе появится типичная входная стрелка.
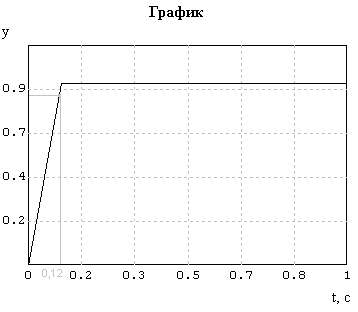
С помощью программы
МВТУ был построен график переходного
процесса 
Рис. 8 График
переходного процесса