

4. Соединение звеньев в системах автоматического управления
В реальных промышленных САУ соединение элементов между собой может быть довольно сложным. Однако любую сложную схему можно разбить на отдельные блоки с одним из трех типовых соединений: последовательным, параллельно-согласованным или параллельно-встречным.
Схема последовательного соединения звеньев представлена на рис. 5.5, а. Так как передаточная функция представляет собой отношение преобразованных по Лапласу выходного сигнала звена к входному, т.е.

то можно записать:
![]()
Следовательно, выходной сигнал каждого из звеньев в последовательной цени можно выразить через его передаточную функцию:
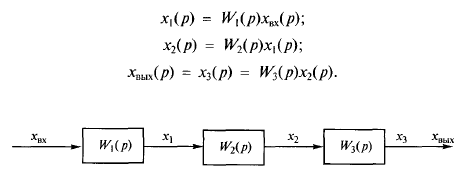
Рис. 5. Соединения звеньев схема цепи с последовательным соединением.
Последовательно подставляя в последнее уравнение выражение входных сигналов, получим
![]()
т.е. передаточная функция цепи последовательно соединенных звеньев имеет вид

5. Постоянная времени
Типовая переходная функция апериодического звена, которая называется экспонентой. Любая экспонента обладает одним замечательным свойством: если к любой ее точке провести касательную, а затем точку касания и точку пересечения касательной с асимптотой, к которой с течением времени приближается экспонента, спроецировать на ось времени, то получится один и тот же отрезок на оси времени.
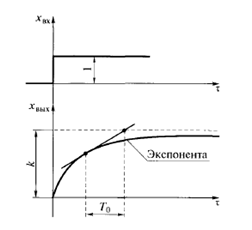
Рис 6. Постоянная времени
Эта проекция, называемая постоянной времени, соответствует коэффициенту Т0, в передаточной функции и АФХ апериодическою звена, а ордината асимптоты, к которой стремится экспонента, — коэффициенту k в его передаточной функции. Таким образом, по переходной функции легко найти коэффициенты k и Т0 в передаточной функции апериодического звена.
Величина Т имеет размерность времени и называется постоянной времени. На рис. 333 представлены переходные процессы инерционного звена первого порядка при различных значениях постоянной времени.
Из кривых переходного процесса ясен физический смысл постоянной времени звена. Она может быть определена как время, в течение которого выходная величина достигла бы своего нового установившегося значения, если бы она изменялась с постоянной скоростью, равной скорости изменения ее в начальный момент времени.
Постоянная времени инерционного звена первого порядка определяет динамические свойства звена. Чем она больше» тем медленнее протекает переходный процесс в звене, и наоборот. В частности, при Т = 0 процесс протекает в звене мгновенно и инерционное звено превращается в безынерционное усилительное. Время регулирования, т. е. время, в течение которого выходная величина практически будет равна новому установившемуся значению хВЫЛ = 0,95 kx0вх равно примерно трем постоянным времени: tp = 3Т. По истечении этого времени динамическая ошибка регулирования составляет всего 5% нового установившегося значения выходной величины.
Следует отметить также, что при t = Т значение выходной величины составляет 63% нового установившегося значения.
Постоянная времени звена геометрически (рис.6) определяется как проекция на ось времени отрезка касательной к экспоненте, заключенного между точкой касания и точкой пересечения касательной с линией установившегося значения выходной величины. Длина этой проекции одинакова для касательных, проведенных в любой точке экспоненты (точки О и О')