

Лекция №4 Теорема о движении центра масс механической системы
Теорема справедлива для изучения изменяемых механических систем. Необходимо различать понятие центра тяжести элементов механической системы и центра масс механической системы.
Центр масс МС движется также, как и материальная точка, масса которой такая же как и у всей МС.
Используем теорему об изменении количества движения:



В проекциях на координатные оси:

Существует следствия из этой теоремы, которые регламентируют частные случаи движения центра масс. В том числе и для нахождения этой точки в состоянии покоя.
Следствие №1
Ежели главный вектор внешних сил, действующих на МС, равен 0, то вектор скорости центра масс постоянен по величине и направлению.

Следствие №2
Ежели проекция главного вектора на какую-либо координатную ось равна 0, то проекция скорости на эту ось – величина постоянная.

Вывод из следствий:
Центр масс будет двигаться прямолинейно и равномерно или находится в состоянии покоя.
Пример: МС «Призма №1 – призма №2»
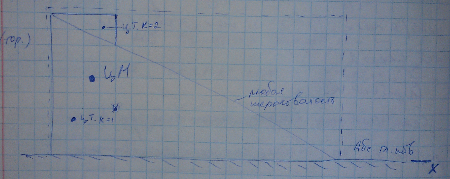
Поверхность должна быть абсолютно гладкой, т.к. в другом случае возникли бы силы трения, которые относятся к внешним силам. Наклон поверхности может быть любой т.к. сила трения относится к внутренним.
Используем следствия №2 для оси OX:
 - прямолинейное равномерное
движение.
- прямолинейное равномерное
движение.
Из начальных условий известно,
что t=0,
 – обе призмы были неподвижны.
Следовательно, положения центра масс
не изменится по оси OX,
т.к. отсутствуют внешние силы, способные
вывести его из состояния покоя.
– обе призмы были неподвижны.
Следовательно, положения центра масс
не изменится по оси OX,
т.к. отсутствуют внешние силы, способные
вывести его из состояния покоя.
Для поступательного движения твёрдого тела используется теорема о движении центра масс и учитывается, что все точки твёрдого тела двигаются так же, как и центр масс.

Теорема об изменении кинетического момента.
В начале рассмотрим понятие момента количества движения для материальной точки.
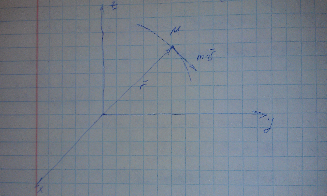
В этом случае необходимо новое понятие – момент количества движения.

Сопоставим по аналогии
понятие момента количества движения
с понятием векторного момента силы
относительно центра (вместо
появится
 ).
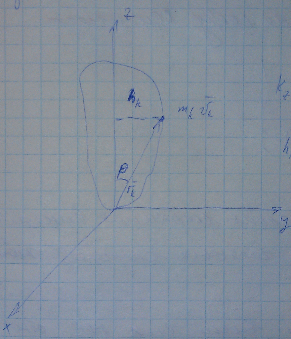
Для механической системы вводится
понятие кинетического момента. Главный
вектор кинетического момента:
).
Для механической системы вводится
понятие кинетического момента. Главный
вектор кинетического момента:
 .
На практике наибольшее значение имеет
проекция Mz, где z
– ось вращения.
.
На практике наибольшее значение имеет
проекция Mz, где z
– ось вращения.

 ,
где
,
где

Теорема:
Первая производная по времени от кинетического момента механической системы, относительно какого-либо центра, равна векторной сумме моментов внешних сил, действующих на эту механическую систему, относительно того же центра.

В проекциях на координатную ось:
Рассмотрим законы сохранения
кинетического момента как частный
случай этой теоремы. Ежели главный
момент внешних сил МС, относительно
какого-либо центра равен 0, то вектор
кинетического момента системы
относительно того же центра будет
постоянен как по величине, так и по
направлению:

Ежели проекция главного момента внешних сил на какую-либо координатную ось равна 0, то величина проекции кинетического момента на ту же ось – величина постоянная.

Рассмотрим два положения: обороты увеличения II, обороты уменьшения I.

Этот закон применим для изменяемых МС.
Дифференциальные уравнения вращательного движения твёрдого тела вокруг неподвижной оси:

Используя теорему об изменении кинетического момента в проекции на ось z:




Обратим внимание, что реакции опор RA и RB являются внешними силами, но момента относительно оси вращения они не создают, поэтому по ни теорема ни дифференциальные уравнения вращательного движения не позволяют рассчитать эти реакции. Это возможно с применением принципа Даламбера – I задача динамики.
Рассмотрим частные случаи:
1. К твёрдому телу прикладывается постоянный момент относительно оси вращения. Тело будет вращаться либо ускоренно, либо будет тормозить.
2. Момент внешних сил относительно оси вращения равен 0. Тело будет вращаться с постоянной частотой (эксплуатационный режим работы).