

2.4 Расчёт и построение статических характеристик замкнутой системы
Для расчета характеристик в замкнутой системе необходимо определить координаты двух точек, через которые должна пройти механическая характеристика пониженной скорости, исходя из требований предъявляемых к рассматриваемому электроприводу и статическом перепаде не более 10%, при изменении нагрузки от 0 до Мном .
Скорость пониженной характеристики при М = 0:
0_пон = 14 c-1
Координаты первой точки:
M1 = 0; 1 = 0_пон
Скорость пониженной характеристики при М =Мн, исходя из статического перепада 10%;
2 = 0_пон – 0,1w0_пон= 14-1,4 = 12,6 c-1
Координаты второй точки:
M2 = Mном;
Расчет статической механической характеристики ЭП производится следующим образом:
Определяются значения выпрямленного тока ротора Id1 и Id2 соответствующие координатам двух заданных точек |M1; s1] и [М2; S2], через которые должна пройти механическая характеристика.
Принимается базисное напряжение схемы управления и рассчитываются коэффициенты ku и ki причем ki рассчитывается для одного значения Rэ соответствующего 1oй или 2ой точке и принимается в дальнейшем неизменным. Постоянная времени форсирующего звена в цепи ОС по току принимается равной Тэ в этой же точке.
Определяется необходимый коэффициент усиления схемы, исходя из координат заданных точек механической характеристики:
kу = (Id2 – Id1) / (Uу2 – Uу1).
В свою очередь:
Uу = Us – Usз = kiId + kuUd – Usз.
Подставив в выражение с kу значения Uу1 и Uу2, получим:
kу = (Id2 – Id1) /(ki (Id2 – Id1) + ku (Uу2 – Uу1)),
или с учетом соотношения:
Ud = Edks – k (r1’ s + r2) Id – 2 Uв,
где для первого режима работы выпрямителя:
Edk = Ed0 – 3 x2Id / p;
В итоге получим:
 Находится
величина задающего напряжения по
формуле:
Находится
величина задающего напряжения по
формуле:
 .
.
При известном коэффициенте усиления для jой точки статической характеристики может быть найдено уравнение для скольжения в таком виде:
 .
.
Задаваясь рядом значений Idj и определяя коэффициент k и момент двигателя, можно найти соответствующие значения скольжения двигателя и по полученным данным построить искомую механическую характеристику ЭП.
Статические характеристики замкнутой и разомкнутой систем представлены на рис.2.10. Построение см. приложение 3.
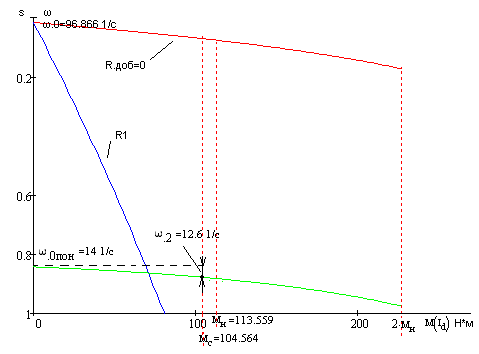
Рис.2.10 Статические характеристики замкнутой и разомкнутой систем
Выводы: В данной главе была разработана принципиальная схема силовой части электропривода и произведен выбор ее основных элементов. Были расcчитаны статические характеристики разомкнутой системы. Так как они не удовлетворяют требованиям жесткости, была разработана замкнутая система. В замкнутой системе были получены характеристики двигательного режима и режима динамического торможения с самовозбуждением. Полученные характеристики удовлетворяют заданным требованиям.
АНАЛИЗ ДИНАМИЧЕСКИХ СВОЙСТВ ЭЛЕКТРОПРИВОДА
3.1. Математическое описание электропривода
Замкнутую систему рассматриваемого ЭП с ОС по скольжению для режима стабилизации скорости при релейном, в функции выпрямленного тока, управлении коммутатором, без учёта дискретности его работы при среднем значении импульсно-регулируемого сопротивления можно представить следующей системой уравнений [3]:

Этой системе уравнений соответствует структурная схема, представленная на рис. 3.1.
На ней видно, что система содержит нелинейности и чтобы иметь возможность исследовать электропривод линейными методами, проведем линеаризацию этих уравнений относительно точки механической характеристики с координатами (Мст; ωст1; Sст1; Iст) [3].

Рис.3.1. Структурная схема ЭП с ОС по скольжению без учёта дискретности работы коммутатора.
Линеаризованная система уравнений для точки разложения с координатами (Мст(Iст); ωст1(sст1)) имеет вид:

где
 ;
; ;
;
 ;
;
Rэо и Тэо – эквивалентное сопротивление и электромагнитная постоянная в точке линеаризации.
При преобразовании структурной схемы линеаризованной системы можно получить передаточную функцию разомкнутой системы по управляющему воздействию:
 .
.
Структурная схема линеаризованной системы электропривода представлена на рис.3.2.

Рис.3.2. Линеаризованная структурная схема ЭП.
Выражения для вещественной и мнимой частей соответствует амплитудно-фазовой характеристики:
 ;
;
 ,
,
где
 ;
;
 ;
;
 ;
;
 .
.
Передаточная функция разомкнутой системы по возмущающему воздействию:
 .
.
Соответствующие выражения для Р и Q:
 ;
;
 .
.
По найденным значениям Р и Q рассчитываются амплитудно-частотная и фазо-частотная характеристики в соответствии с формулами:
 ;
;
 .
.