

2.2. Расчет и построение статических характеристик в разомкнутой системе
Расчёт характеристик электропривода в такой системе производится в следующем порядке:
Определяются соответствующие значения выпрямленного тока ротора Id пер1,2 на границе перехода из 1 режима во 2 режим.
Id ПЕР 1,2 = Ed0 / 12x2=226.907 А
Привод работает только в первом режиме: Idmax = 125,96 А.
При
построении воспользуемся уточнённым
методом расчёта, и так как
 ,
то характеристики строим только для
первого режима коммутации вентилей.
Для построения механических характеристик
необходимо: задаваясь значением
выпрямленного тока ротора
,
то характеристики строим только для
первого режима коммутации вентилей.
Для построения механических характеристик
необходимо: задаваясь значением
выпрямленного тока ротора последовательно
вычислять угол коммутации вентилей
γ(Id)
и коэффициента учитывающего изменение
сопротивления вентилей k(Id)
соответственно по выражениям:
последовательно
вычислять угол коммутации вентилей
γ(Id)
и коэффициента учитывающего изменение
сопротивления вентилей k(Id)
соответственно по выражениям:


Затем вычисляя скольжение по формуле:

вычисляем значение угловой скорости вращения:

Значение момента двигателя в разомкнутой системе вычисляется по формуле:

Детальный расчёт и построение статических механических характеристик в разомкнутой системе приведены в П.2. Механические характеристики в разомкнутой системе приведены на рис.2.7

Рис.2.7. Статические механические характеристики в разомкнутой системе
2.3. Синтез системы автоматического регулирования
Применение замкнутых систем существенно улучшает статические и динамические характеристики асинхронных ЭП с импульсным регулированием в цепи выпрямленного тока ротора. Появляется возможность регулирования, как скорости, так и момента двигателя по необходимому закону, в различных режимах его работы. Скорость асинхронного ЭП с импульсным регулированием в цепи выпрямленною тока ротора может контролироваться непосредственно, например, с помощью тахогенератора или косвенным путем через напряжение на выходе роторного выпрямителя и выпрямленный ток ротора. В связи с тем, что установка тахогенератора на асинхронном ЭД с контактными кольцами вызывает определенные затруднения, в ряде случаев предпочтительным является второй вариант.
Для стабилизации скорости рассматриваемого ЭП можно воспользоваться комбинацией обратных связей (ОС) по току Id и напряжению Ud исходя из уравнения для первого режима работы выпрямителя:
Ed0 s = Rэ Id + k Lдр Id + Ud,
где Rэ - эквивалентное внутреннее сопротивление роторного выпрямителя в первом режиме коммутации;
Rэ = [3x2s/ + k(r’1s + r2)];
где k – коэффициент, характеризующий изменение внутреннего сопротивления , выпрямителя;
Приняв Rэ = const, k = const, получим
S = [Rэ(Tэp + 1)Id + Ud] / Ed0, где Tэ = kLд / Rэ
Следовательно,
=
с

Таким образом, для получения сигнала обратной связи, характеризующего скорость двигателя, необходимо иметь сигналы по выпрямленному напряжению Ud и выпрямленному току Id, причем в цепь ОС по току должно быть включено форсирующее звено с постоянной двигателя Тэф, равной электромагнитной постоянной двигателя Тэ.
Преобразовав последнее выражение к виду:

и умножив все члены выражения на ku получим уравнение для сигнала обратной связи в системе управления:
Uос = Uб / с = ku Ed0 – [ki (Tэp+ 1) Id + ku Ud],
где Uб – базисное напряжение схемы управления, зависящее от применяемых в схеме элементов;
ku – коэффициент усиления датчика напряжения роторного выпрямителя;
ki – коэффициент усиления датчика тока роторного выпрямителя;
ku = Uб / Ed0;
ki
= ku
Rэ =

Так как величина Rэ и Тэ двигателя в действительности изменяются при изменении скольжения s и нагрузки,, характеризуемой коэффициентом k, то при неизменных параметрах цепи ОС ki и Тэф точная настройка сигнала ОС по скорости возможна лишь в одной точке механической характеристики, где Тэ = Тэф. В других точках Тэ Тэф и сигнал Uoc будет характеризовать скорость двигатля с некоторой ошибкой.
При применении для стабилизации скорости ЭП комбинации обратных связей по току Id и напряжению Ud удобнее контролировать скольжение двигателя, а не его скорость. Это упрощает как реализацию схемы управления, так и уменьшает объем математического описания.
Уравнение для сигнала ОС по скольжению в этом случае имеет следующий вид
Us = Uбs = ki (Tэф p + 1) Id + ku Ud.
Функциональная схема асинхронного ЭП с импульсным регулятором в цепи выпрямленного тока ротора, реализующая в режиме стабилизации скорости релейное управление коммутатором при ОС по скольжению, получаемой суммированием сигналов Uu и Ui приведена на рис.2.8, где сигнал Us получаегся суммированием сигнала по выпрямленному напряжению Uu = ku Ud, снимаемого с потенциометра RP, с сигналом по выпрямленному току и его производной
Ui = ki (Tэфp + 1) Id ,
который формируется из сигнала по выпрямленному току, снимаемого с шунта RS, посредством форcирующего звена с постоянной времени Тэф.
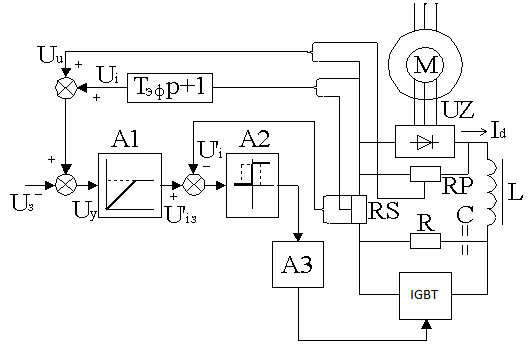
Рис. 2.8 Функциональная схема асинхронного ЭП с импульсным регулятором в цепи выпрямленного тока ротора
В роторную цепь асинхронного ЭД включен неуправляемый трехфазный мостовой выпрямитель UZ, к выходу которого последовательно с дросселем L подключено R или RC-цспь, периодически шунтируемая коммутатором UR- В качестве UR может быть использован транзисторный коммутатор.
Система автоматического регулирования координат ЭП содержит два контура: внутренний релейный контур регулирования выпрямленного тока ротора и наружный контур регулирования скольжения двигателя. Если сигнал ОС по выпрямленному току ротора Ui , снимаемый с шунта RS, достигает заданного уровня токоограничения Uiз, то на выходе релейного элемента А2 появится сигнал, который пройдя через формирователь импульсов A3, подает запрет на транзистор IGBT. Выпрямленный ток ротора при этом начнет уменьшаться и при каком-то его уровне, когда Ui станет меньше Uiз, релейный элемент возвратится в исходное состояние, отпирая транзистор IGBT. Ток ротора опять будет, увеличивается, и процессы повторяются. Регулируя гистерезис релейного элемента, при данных параметрах схемы можно ограничить максимальную величину частоты коммутации транзистора IGBT в режиме релейного токоограничения при формировании вертикальных участков статических характеристик ЭП. В режиме стабилизации скорости ЭП уставка токоограничения не остается постоянной, а является функцией скольжения. Величина уставки токоограпичеиия определяется сигналом Uiз получаемым при прохождении сигнала управления Uy через усилитель с ограничением Al. Сигнал Uy формируется путем алгебраического суммирования сигналов задания и ОС по скольжению. Сигнал по скольжению Us получается суммированием сигнала по выпрямленному напряжению Uu, снимаемого с потенциометра RP, с сигналом по выпрямленному току и eго производной Ui, который формируется посредством шунта RS и форсирующего звена с постоянной времени Тф.
Влияние задающего напряжения Usз на вид статических характеристик показано на рис. 2.9.
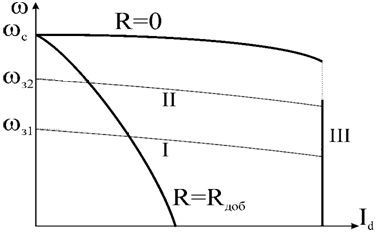
Рис.2.9 Статические характеристики
Задающим напряжениям Usз1 > Usз2 соответствует скорости з1 < з2 при которых Uy = 0 и коммутатор заперт. При шунтируемой RC-цепи этому состоянию соответствуют скорости з1 и з2, являющимися скоростями идеального холостого хода. В случае шунтирования R-цепи запертому состоянию коммутатора соответствует реостатная характеристика с Rдоб = R, на которой находятся з1 и з2.
При увеличении нагрузки на валу скорость двигателя уменьшается, сигналы Us, Uy, Uiз и соответственно средние значение выпрямленного тока ротора и момента двигателя увеличиваются, и таким образом формируются жесткие участки статических характеристик; I и II - для шунтируемой RC-цепи и I’ и II’ - для шунтируемой R-цепи.
Когда напряжение U’i, пропорциональное выпрямленному току Id достигнет значения Uiз в действие вступает контур токоограничения, который поддерживает постоянство заданного значения выпрямленного тока ротора Idз по релейному принципу, формируя вертикальную характеристику III.