

2. Разработка системы управления электропривода
2.1 Разработка силовой схемы и выбор основных элементов
Принципиальная электрическая схема силовой части двухдвигательного электропривода механизма передвижения крана с импульсным регулятором на IGBT-транзисторе представлена на рис.2.1.
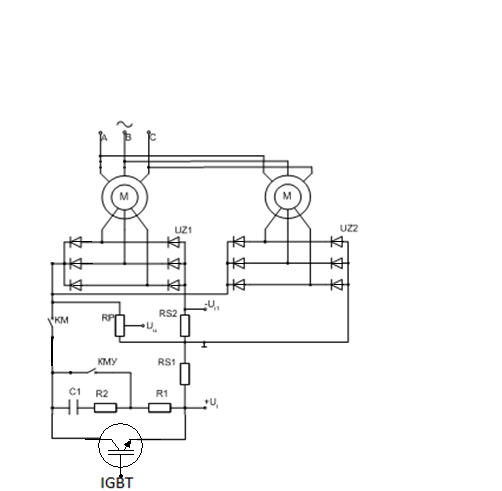
Рис.2.1 Принципиальная электрическая схема силовой части ЭП
В роторные цепи двигателей M1 и M2 включены неуправляемые трехфазные мостовые выпрямители (UZ1 и UZ2), выходы которых соединены параллельно и замкнуты на активно-емкостную цепь из конденсатора C1 и резисторов R1 и R2, шунтируемую IGBT транзистором. При разомкнутых контактах КМУ регулирование тока и момента двигателей осуществляется путем изменения добавочного сопротивления в общей цепи выпрямленного тока роторов в пределах от нуля до бесконечности при изменении скважности работы коммутатора соответственно от единицы до нуля. Расширение области регулирования в зону больших значений моментов и токов достигается замыканием контактов КMУ, шунтирующих активно-емкостную цепь из конденсатора С1 и резистора R2. При этом добавочное сопротивление в цепи выпрямленного тока роторов может изменяться за счет регулирования скважности коммутатора в пределах от R1 практически до нуля.
Для выделения сигналов обратных связей по напряжению на выходе выпрямителей uu, суммарному выпрямленному току роторов ui и выпрямленному току ротора ведущего двигателя ui1 в схеме предусмотрены потенциометр RP и шунты RS1 и RS2.
Расчеты по выбору элементов схемы проводим исходя из схемы замещения асинхронного двигателя по цепи выпрямленного тока ротора, представленной на рис.2.2.

Рис.2.2 Схема замещения асинхронного двигателя по цепи выпрямленного тока ротора
На схеме (рис.2.2.) обозначены: Ed – среднее значение ЭДС выпрямителя; k – коэффициент, характеризующий изменение внутреннего сопротивления роторного выпрямителя в функции угла коммутации g; r1' – активное сопротивление фазы статора, приведенное к роторной цепи; r2 – активное сопротивление обмоток ротора; L¶ = L1' + L2 – индуктивность фазы двигателя; Ld и Rd соответственно индуктивность и активное сопротивление в цепи выпрямленного тока ротора; VD1, VD2, VD3 – вентили, эквивалентные по своему действию вентилям выпрямительного моста.
Активное сопротивление фазы статора, приведенное к роторной цепи
r1' = r1 · s1 / k пр = 0,48 · 1,073 / 4,2 = 0,123 Ом.
Активное сопротивление фазы роторной обмотки
r2 = r2 · s12 = 0,111 · 1,0732 = 0,128 Ом.
Индуктивное сопротивление фазы статора, приведенное к роторной цепи
x1' = x1 · s1 / kпр = 0,465 · 1,073 / 4,2 = 0,119 Ом.
Среднее значение ЭДС выпрямителя при разомкнутой цепи
Ed0
= 3 E2м
/ p,
E2м
/ p,
где
Е2м= =
=
 -
амплитуда фазной ЭДС ротора при
разомкнутых кольцах
-
амплитуда фазной ЭДС ротора при
разомкнутых кольцах
и S=1;
Ed0 = 3 E2м / p = 3 · · 140,437/ 3,14 = 232,281 В.
Индуктивное сопротивление фазы роторной обмотки

Ток и момент перехода из первого режима коммутации вентилей выпрямителя во второй [ ]
 А;
А;

где к – коэффициент, учитывающий изменение внутреннего сопротивления в роторном выпрямителе;
к
= 2 - 3·γ/(2·π);
γ=
arccos (1- )=
arccos (1-
)=
arccos (1- )
)
к=1.5 – для 1-го режима коммутации;
Максимальный момент, ограничиваемый схемой управления:

Следовательно, во всем диапазоне изменения момента роторный выпрямитель работает в первом режиме коммутации.
Определим ток, соответствующий моменту 2·Мн, 1,35·Мн, Мн.
Для момента 2Мн:
 ,
,

Из этого выражения получим значение тока Id
Idmax = 123,75 А.
Уточним значение k:
γ=
arccos
(1- )=0.756
рад;
)=0.756
рад;
к = 2 - 3·0.756/(2·π)=1.639;
Найдем Id во втором приближении:

Из этого выражения получим значение тока Id
Idmax = 125,96 А.
Найдем к:
γ=
arccos
(1- )=0.763
рад;
)=0.763
рад;
к = 2 - 3·0.763/(2·π)=1.635;
Для момента 1,35Мн:
 ,
,

Из этого выражения получим значение тока Id
Id = 74,44 А.
Уточним значение k:
γ=
arccos
(1- )=0.581
рад;
)=0.581
рад;
к = 2 - 3·0.581/(2·π)=1.723;
Найдем Id во втором приближении:

Из этого выражения получим значение тока Id
Id = 75,37 А.
Найдем к:
γ=
arccos
(1- )=0.585
рад;
)=0.585
рад;
к = 2 - 3·0.585/(2·π)=1.721;
Для момента Мн
 ,
,

Получим значения тока Id
Idmin = 52,60 А.
Уточним значение k:
γ=
arccos
(1- )=0.486
рад;
)=0.486
рад;
к = 2 - 3·0.486/(2·π)=1.768;
Найдем Id во втором приближении:

Из этого выражения получим значение тока Id
Id = 53,10 А.
Найдем к:
γ=
arccos
(1- )=0.489
рад;
)=0.489
рад;
к = 2 - 3·0.489/(2·π)=1.767;
Сопротивление резистора R3 выбирается таким образом, чтобы реостатная характеристика с R доб= R 3 проходила через точку с координатами S=1; М1=1.35Мн.
1,35·М н = 1,35·113.559= 153.305 Н·м.

Для расчета сопротивлений R 1 и R 2 необходимо задаться максимально- допустимым напряжением на IGBT транзисторе.
Принимаем максимально-допустимое напряжение на IGBT транзисторе
UДОП = 700 В, тогда величина последней ступени, шунтированной тиристорным коммутатором:
Сопротивление R 1
R 1 = UДОП / I dmax,
где UIGBT - напряжение на IGBT транзисторе;
R 1 = 700 / 125,96 = 5,557 Ом.
Суммарное сопротивление:
R å = R 1 + R 2 = (UДОП – U ост) / I d,
где U ост - остаточное напряжение на конденсаторе, принимаемое равным
Uост =150 В.
Rå = (700 – 150) / 75,37 = 7,297 Ом.
Сопротивление R2
R 2 = R å - R 1 = 7,297 – 5,557= 1,74 Ом.
Выбор конденсатора.
Ёмкость конденсатора
C1 ³ k12 · 2L ¶ · I d2 / UIGBT 2,
где L¶ = L1' + L2 - индуктивность фазы двигателя;
I d – ток, соответствующий моменту 1.35Мн.
L 1' = x1' / wэл = 0,119 / 314 = 0,379 · 10-3 Гн;
L 2 = x2 / wэл = 0,241 / 314 = 0,767 · 10-3 Гн;
L ¶ = 0,379 · 10-3 + 0,767 · 10-3 = 1,146 · 10-3 Гн;
C 1 ³ 1,635 ·2·1,146 · 10-3 ·74,442 / 7002 = 42.38 мкФ.
В качестве С1 выбираем по [ ] конденсатор К75-69 ёмкостью 70 мкФ на напряжение 1000 В.Его длина составляет 140 мм, диаметр 75мм.
Выбор диодов неуправляемых выпрямителей UZ1 и UZ2.
Ток одного диода выпрямительного моста UZ1 (UZ2)
I VD = k з · Idmax /( m · k охл),
где k з = 1.5 - коэффициент запаса;
m = 3 - количество фаз;
kохл = 0,35 - коэффициент охлаждения, при естественном охлаждении;
I VD = 1.5 · 125,96/( 3· 0,35) = 179,943 A .
Максимальное обратное напряжение диода:
U
обр.
мах
= kзн
·
 ·2· Е2к
=
1,6 ·
·2·172
= 778,383 В,
·2· Е2к
=
1,6 ·
·2·172
= 778,383 В,
где к зн=1,6 – коэффициент запаса по напряжению.
Из [ ] выбираем низкочастотные диоды ДЛ161-200-9 с охладителем О-171.
Выбор ключа UR
Импульсный регулятор выполнен на основе биполярного транзистора с изолированным затвором IGBT. Использование IGBT транзистора позволяет исключить из схемы управления систему распределения импульсов на тиристоры, блоки искусственного запирания и блоки подпитки, необходимые для них, но при этом длятранзистора необходимо наличие специального драйвера, который согласует работу системы управления и транзистора, а также выполняет защитные функции.
Для обеспечения высокого уровня надежности амплитудное значение тока коллектора должно быть не более 70 - 80 % от максимально допустимого значения постоянного тока коллектор-эмиттер.
Значение пикового напряжения VCEmax должно быть не более 80 % от максимально допустимого напряжения коллектор-эмиттер.
Для защиты модулей от перенапряжений в цепи коллектор-эмиттер рекомендуется применение снабберных цепей.
При монтаже и эксплуатации необходимо принять меры по защите IGBT модулей от воздействия статического электричества и перенапряжений в цепи затвора (при монтаже обязательно применение персоналом заземляющих браслетов и заземленных низковольтных паяльников с питанием через трансформатор). Использование модуля при напряжениях питания значительно ниже, чем минимальное значение выбранного, нежелательно, так как при этом увеличиваются динамические потери.
Исходя из условий выбора ток коллектора:

Максимальное значение напряжения на ключе (напряжение):

Исходя из условий выбора:

Выберем из [ ]быстродействующий одиночный IGBT типа МТКИ-200-12 с внутренним обратным диодом со следующими параметрами:
максимально допустимое напряжение коллектор-эмиттер, В 1200;
максимальный постоянный ток коллектора при 70 ºС, А 200,
повторяющийся импульсный ток коллектора, А 300;
температура эксплуатации, ºС -55...+150;
масса, г 350.
Габаритные и установочные размеры транзистора приведены на рис. 2.3:

Рис. 2.3. Габаритные и установочные размеры МТКИ-200-12.
Для согласования работы системы управления и транзистора выберем модуль связи (драйвер). Драйвер выбирается исходя из обеспечения необходимых параметров работы IGBT модуля и параметров входного сигнала (управление 5В логикой).
В связи с этим выберем рекомендуемый для данного транзистора драйвер 1ДР-10-12(17)-H2 со следующими параметрами:
напряжение питания драйвера Vcc, В 14,5 –15,5;
входной логический сигнал при 0 – Vcc, высокий уровень 5,
низкий уровень 2,2;
выходное напряжение, В
низкий уровень -8;
высокий уровень 15;
время включения/выключения, нс 350;
температура эксплуатации, ºС -40…+85.
Схема подключения драйвера к силовому модулю показана на рис.2.4:
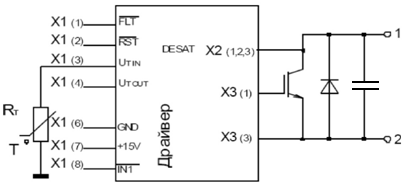
Рис.2.4. Схема подключения драйвера к силовому модулю.
Габаритные и установочные размеры приведены на рис. 2.5:

Рис.2.5. Габаритные и установочные размеры драйвера 1ДР-10-12(17)-H2.
Для данного модуля выбираем охладитель О25.
В качестве резисторов R1, R2 резисторы серии БЛП. Диапазон номинальных сопротивлений 1..20 Ом.

Рис.2.6. Габаритные и установочные размеры резисторов БЛП.