

Особенности построения и функционирования систем прямого цифрового управления
Рассмотрим комплекс технических средств (КТС) АСУТП представляющий собой управляемую вычислительную систему, предназначенную для прямого цифрового управления
КТС АСУТП отличается от КТС других АСУ наличием блока УСО (устройство сопряжения с объектом), который обеспечивает связь управляющей вычислительной машины (УВМ) с датчиками и исполнительными устройствами, установленными на объекте управления. В качестве УВМ в современных АСУТП используются персональные ЭВМ или специальные микропроцессорные устройства.
При традиционном управлении с помощью средств локальной автоматики на нижнем уровне АСУТП каждому исполнительному механизму соответствует отдельная локальная система. При использовании ПЦУ УВМ получает информацию от датчиков, характеризующих состояние всего технологического процесса, и последовательно выдаёт управляющие сигналы каждому исполнительному органу; при этом она может одновременно осуществлять регулирование нескольких контуров управления. Принцип функционирования системы ПЦУ показан на рис. 3.20.
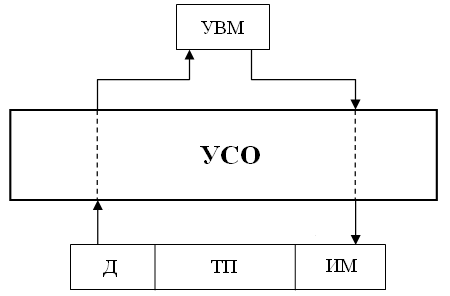
Рис. 3.20. Функциональная схема системы ПЦУ
В фиксированные моменты времени УВМ посредством целевой адресации выполняет циклический опрос датчиков, затем последовательно сравнивает заданные и фактические значения регулируемых величин, после чего по алгоритмам управления производит расчёт и выдачу управляющих команд. По истечении периода дискретности описанная процедура повторяется.
С тем же периодом дискретности из УВМ информация выдаётся на ЦАП, который преобразует цифровой код в непрерывный сигнал, поступающий на исполнительные механизмы (ИМ) технологического процесса (ТП).
Рассмотрим более подробно состав и функции УСО, которые во многом обеспечивают решение задач первичной и вторичной обработки информации.
УСО представляют собой наборы агрегатных модулей сбора, коммутации и преобразования сигналов контроля и выдачи сигналов управления на объектах, оснащенных датчиками, системами местной (локальной) автоматизации и исполнительными механизмами. Агрегатность позволяет легко наращивать количество каналов и типов функций, благодаря чему УСО можно оптимально согласовывать с требованиями конкретных систем.
На рис. 3.21. приведена схема УСО при вводе аналоговых сигналов.
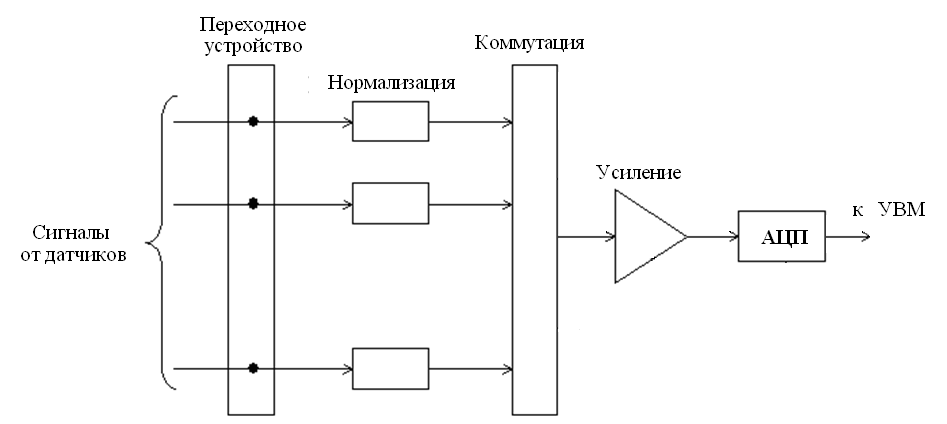
Рис. 3.21. Схема УСО при вводе аналоговых сигналов
УСО могут выполнять следующие функции:
1. Подключения. Сигналы с датчиков передаются на аналоговые входы по одиночным или парам проводов. Сигнальные провода должны оканчиваться в точке сопряжения с аналоговой подсистемой. Устройствами подключения, предназначенными для этой цели, могут служить клеммные колодки, кабельные разъемы и т.д.;
2. Нормализация сигнала, т.е. модификация сигнала (фильтрация, ослабление, смещение уровня, линейная или нелинейная компенсация, преобразование тока в напряжение (усиление исключается)).
3. Усиление
сигнала. Осуществляется с помощью
усилителей трех типов: а) усилители
сигналов низкого уровня, коэффициент
усиления которых может быть 100![]() 1000;
б) буферный усилитель, имеющий высокое
входное и низкое выходное сопротивление,
коэффициент усиления 1 или 2; в) усилитель
слежения-запоминания, его выход
пропорционален входу до тех пор, пока
не последует команда запоминания, после
чего выходной сигнал остается неизменным
до конца действия команды.
1000;
б) буферный усилитель, имеющий высокое
входное и низкое выходное сопротивление,
коэффициент усиления 1 или 2; в) усилитель
слежения-запоминания, его выход
пропорционален входу до тех пор, пока
не последует команда запоминания, после
чего выходной сигнал остается неизменным
до конца действия команды.
4. Коммутации, коммутатор состоит из электронного или электромеханического переключателя, последовательно подключающего каждый отдельный вход или выход к ТП. Коммутация осуществляется до или после усиления. Коммутаторы различают по уровням сигналов, быстродействию и числу направлений коммутации.
5. Аналого-цифровое (или цифро-аналоговое) преобразование, которое осуществляется с помощью преобразователей АЦП. Основные характеристики АЦП: время преобразования и длина разрядной сетки.
При построении алгоритмов управления динамическими процессами на базе УВМ часто исходят из принципов действия хорошо исследованных линейных аналоговых регуляторов: пропорционального (П), интегрального (И), пропорционально-дифференциального (ПД), пропорционально-интегрального (ПИ) и пропорционально-интегрально-дифференциального (ПИД), хотя в системе ПЦУ могут быть реализованы и более сложные и эффективные законы управления. Преимущество применения типовых алгоритмов управления в системе ПЦУ заключается в том, что при малых интервалах дискретности Т параметры дискретного регулятора могут быть рассчитаны с помощью, используемых в теории управления, методов расчёта регуляторов непрерывного действия. Поэтому параметры цифровых алгоритмов ПИД-структуры можно определить путём формального представления непрерывных алгоритмов в цифровой форме.
Уравнение П-регулятора непрерывного действия можно записать следующим образом:
U(t) = KР · ε(t), (3.33)
где KР - коэффициент усиления регулятора;
ε – ошибка регулирования.
Представим выражение (3.33) в дискретной форме:
U(nT) = KР · ε (nT),
где nT – периоды дискретности при n = 0, 1, 2, ….
Для
сокращения записи удобно ввести в
рассмотрение безразмерное время
![]() ,
при котором дискретное время будет
определяться только числом интервалов
n.
В этом случае уравнение дискретного
П-регулятора может быть записано как
,
при котором дискретное время будет
определяться только числом интервалов
n.
В этом случае уравнение дискретного
П-регулятора может быть записано как
U(n) = KР · ε (n). (3.34)
Уравнение аналогового ПИ-регулятора имеет вид
![]() ,
(3.35)
,
(3.35)
где TИ - постоянная времени интегрирования.
Запишем выражение (3.35) в дискретной форме:
![]() .
(3.36)
.
(3.36)
![]() -
величина периода квантования
-
величина периода квантования
Такая запись алгоритма требует запоминания всех предыдущих значений ошибки, взятых в дискретные моменты времени. Поэтому, учитывая, что
![]() ,
,
дискретный ПИ-алгоритм, описываемый уравнением (3.36), можно представить выражением
![]() .
. (3.37)
.
. (3.37)
Уравнение непрерывного ПИД - регулятора можно записать следующим образом:
![]() ,
(3.38)
,
(3.38)
где Тg - постоянная времени дифференцирования.
Представим уравнение регулятора в дискретной форме:
![]()
![]() .
(3.39)
.
(3.39)
Учитывая, что
![]() ,
,
алгоритм дискретного ПИД-закона можно записать в рекуррентной форме:
![]() .
(3.40)
.
(3.40)
Или введя обозначения:
![]()
где обозначено
![]() ,
,
![]() ,
,
![]()
Структурная схема
цифрового ПИД регулятора приведена на
рис. 3.22., где через
![]() обозначен
блок задержки сигнала на один период
квантования.
обозначен
блок задержки сигнала на один период
квантования.
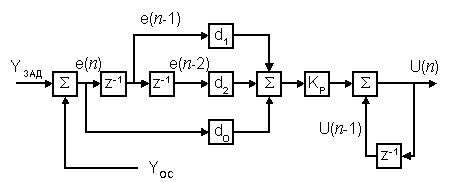
Рис. 3.22. Структурная схема скоростного ПИД-регулятора
Выражения (3.37) и (3.40) описывают позиционный алгоритм регулирования, у которого выходной величиной является перемещение, отрабатываемое исполнительным органом за каждый период дискретности.
Наряду с этим может быть использован и скоростной алгоритм регулирования, который отличается расположением интегрирующего участка. В этом случае интегрирование осуществляется исполнительным механизмом (двигателем постоянной скорости или шаговым двигателем), а выходной величиной регулятора является скорость перемещения исполнительного органа. Законы регулирования соответственно для ПИ- и ПИД -алгоритмов записываются в следующем виде:
![]() ;
(3.41)
;
(3.41)
![]() ,
,
где ΔU(n) = U(n) – U(n – 1).
На основании полученных зависимостей для конкретных условий работы данного контура регулирования в системе ПЦУ рассчитывается управляющее воздействие. При соблюдении всех ограничений оно непосредственно выдаётся на исполнительный орган объекта.
Одна из возможных схем практической реализации дискретного ПИД- алгоритма по выражению (3.40) для одного канала регулирования представлена на рис.3.23.
Входными данными алгоритма являются:
хЗ - заданное значение регулируемой величины;
хВ, хН - верхнее и нижнее ограничения по регулируемой переменной;
Umax, Umin - ограничения на управление;
 -
коэффициенты ПИД-алгоритма;
-
коэффициенты ПИД-алгоритма;
U(0), E(0) – начальные значения координат управления и ошибки регулирования.
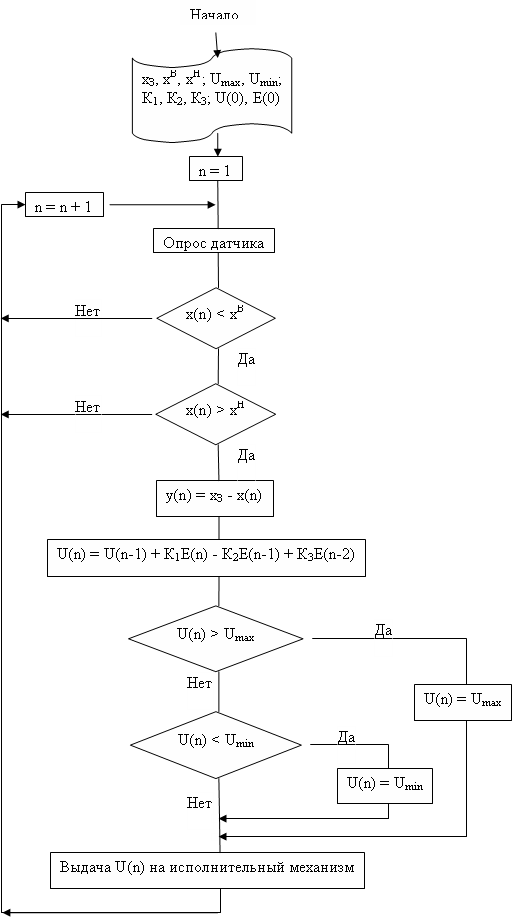
Рис. 3.23. Схема дискретного ПИД-алгоритма
Опрос датчика осуществляется через интервалы дискретности n. Для каждого интервала измеряется регулируемая величина х(n), производится проверка ограничений, вычисление ошибок регулирования E(n) и управления U(n). После проверки ограничений на управление происходит выдача U(n) на исполнительный механизм, после чего цикл регулирования повторяется.