

§4. Система управления с переменной структурой объектом второго порядка.
Покажем технику применения скользящих режимов на фазовой плоскости на примере системы второго порядка, относящейся к так называемому классу систем с переменной структурой. Этот класс систем был разработан коллективом ученых под руководством С.В.Емельянова в конце 60-х годов.
Предположим, что объект управления имеет передаточную функцию
![]() (1)
(1)
Коэффициенты передаточной функции b и с могут изменяться в процессе работы, принимая, в том числе, и отрицательные значения. Известно только, что по модулю они ограничены некоторой величиной d. Рассмотрим способ построения системы стабилизации такого объекта, т.е. задача состоит в том, чтобы при любом начальном положении фазовых координат объекта выход системы возвращался в исходное положение равновесия.
Для решения поставленной задачи используем систему, структурная схема которой приведена на рисунке 1.
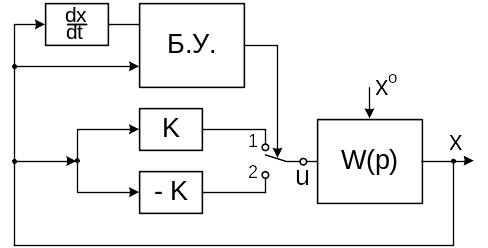
Рис. 1
Система работает следующим образом. В зависимости от величины изображающей точки на фазовой плоскости xy (y = x’) блок управления соединяет вход системы (координата u) или с точкой 1 или с точкой 2. В результате система на рисунке 1 преобразуется в одну из линейных систем, показанных на рисунках 2 и 3.
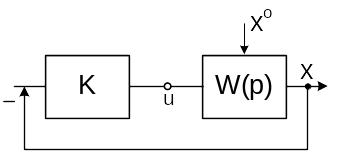
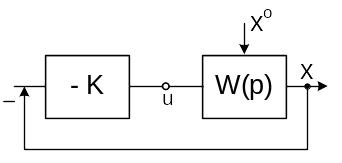
Рис. 2 Рис. 3
Характеристическое уравнение для структуры, изображённой на рисунке 2, имеет вид:
![]() (2)
(2)
Величину k выбирают из условия, чтобы она была значительно больше d. Корни характеристического уравнения (2):
p1,2=![]() (3)
(3)
Характеристическое уравнение для структуры, изображённой на рисунке 4, имеет вид:
![]() (4)
(4)
Корни характеристического уравнения (4):
p1,2=![]() (5)
(5)
Корни уравнения (3) являются комплексными (устойчивыми или неустойчивыми в зависимости от знака коэффициента b), а корни уравнения (5) являются действительными и разного знака. Эти утверждения следуют из того, что величина k выбирается значительно больше, чем модуль коэффициентов b и с. Поэтому можно приближённо записать:
![]() (6)
(6)
![]() (7)
(7)
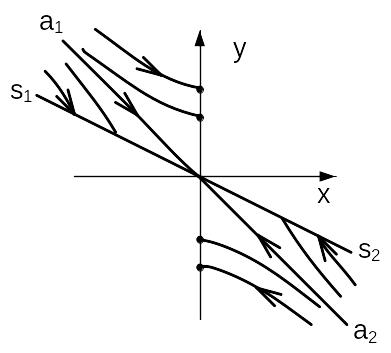
Таким образом, структура на рисунке 2 имеет особую точку типа «фокус» (устойчивую или неустойчивую, в зависимости от знака коэффициента b). А структура на рисунке 3 имеет особую точку типа «седло». На рисунках 4 и 5 приведены фазовые портреты для неустойчивого фокуса и узла. При этом в случае «узла» обозначена асимптота траектории, соответствующая устойчивому корню узла. К примеру, если характеристическое уравнение (4) имеет действительные корни –α и +β (α,β>0), то уравнение асимптоты а1а2 имеет вид:
y = -αx (8)
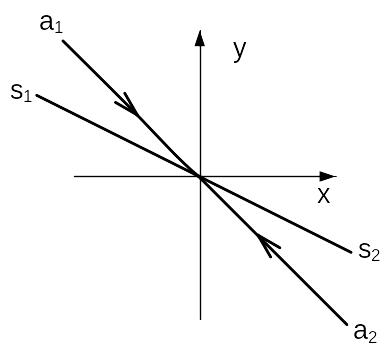
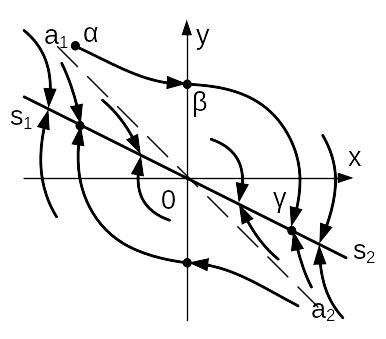
Проведем на плоскости линию S1S2, имеющую равнение y = λx. Величина λ выбирается таким образом, чтобы при любом допустимом значении α линии а1а2 и S1S2 располагались, как показано на рисунке 6.
Рис.4
|
Рис.5 |
Рис. 6 |
Рис. 7 |
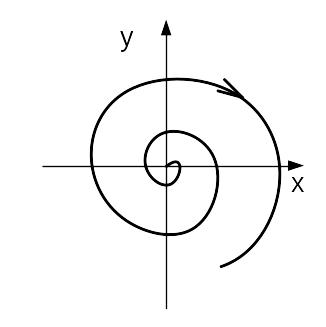
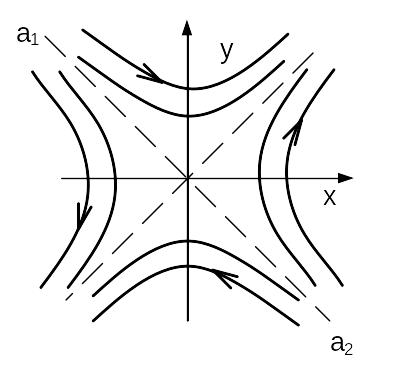
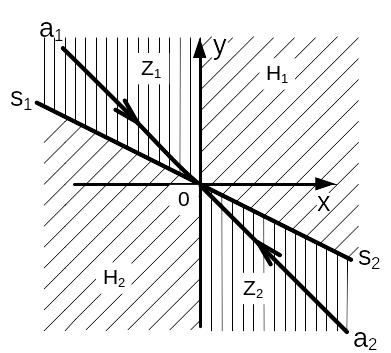
Блок управления разбивает фазовую плоскость на области. Первая область - Z1Z2, вторая область – Н1Н2, как показано на рисунке 7. Если изображающая точка находится в области Z1Z2, то включается система, изображенная на рисунке 2, и точка движется по соответствующей ветви гиперболы (седла), как показано на рисунке 9, до попадания на одну из границ области. Если изображающая точка находится в области Н1Н2, то включается система, изображенная на рисунке 3., и изображающая точка движется по спирали устойчивого или неустойчивого фокуса пока не выйдет на границу области (рис. 8).
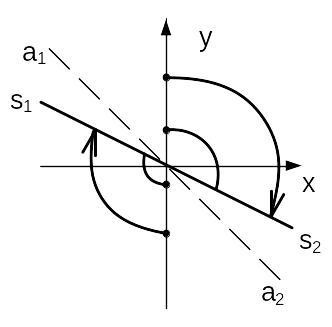
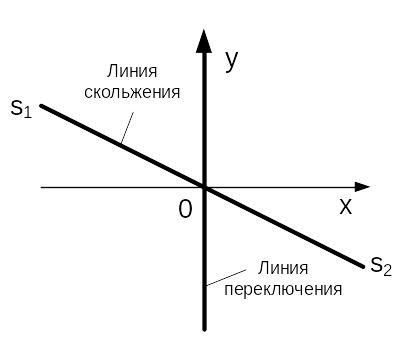
Как видно из рисунка 10, изображающая точка, попав на линию S1S2, не может с нее сойти, т.к. все траектории острием упираются в линию S1S2.
Изображающая точка движется по этой линии к началу координат в соответствии с дифференциальным уравнением
![]() (9)
(9)
Линия S1S2 называется линией скольжения, а уравнение (9) – уравнением скольжения.
На рисунке 11 показано разбиение фазовой плоскости, которое использует регулятор при стабилизации объекта.
Рис.8
|
Рис.9
|
Рис.10
|
Рис.11
|
Замечание.
Обратим внимание, что одна из двух линейных структур, показанных на рисунках 2 и 3, заведомо неустойчива (это структура 3), а другая структура (показанная на рисунке 2) может быть устойчивой и может быть неустойчивой в зависимости от знака коэффициента b. Однако, исходная система, получаемая в результате переключения с одной структуры на другую, является устойчивой. Отсюда ясно происхождение названия – «система с переменной структурой».