

4 Рекомендации по моделированию системы
4.1 Моделирование в системах управления технологического уровня
В системах управления технологического уровня обычно моделируют работу исполнительных устройств.
При моделировании привода постоянного тока, для которого разработано достаточно полное математическое описание, целесообразно применять функциональные модели пакета MATLAB/Simulink.
Для моделирования приводов переменного тока, отличающихся громоздкими математическими преобразованиями и переходами от одной системы координат к другой, более эффективно применение виртуальных блоков, имеющихся в библиотеках приложения SimPowerSystems пакета MATLAB/Simulink.
Виртуальные блоки позволяют моделировать преобразователи, включенные в сеть однофазного и трехфазного напряжения. Типы виртуальных блоков приведены на рис. 4.1.
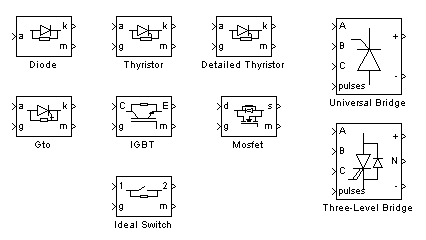
Рисунок 4.1 – Виртуальные блоки полупроводниковых преобразователей в SimPowerSystems
Следует учесть, что тиристорные мостовые схемы моделируются с использованием блока Universal Bridge.
Полная виртуальная модель системы векторного управления асинхронным короткозамкнутым двигателем с регулятором момента (power_acdrive.mdl) приведена на рисунке 4.2.
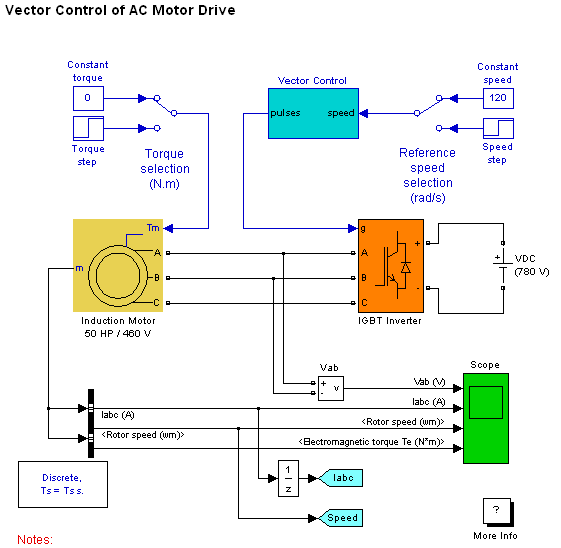
Рисунок 4.2 – Структурная схема модели системы частотного управления двигателем переменного тока
Модель позволяет исследовать ток статора, момент и скорость вращения в переходных процессах при изменении начальных условий или параметров настройки регуляторов.
Модель включает в себя три основных компонента:
Виртуальный асинхронный двигатель (Induction Motor), задание параметров которого производится в окне настройки;
Трехфазный автономный инвертор на IGBT-транзисторах, параметры которого задаются в окне его настройки;
Система векторного управления (Vector Control).
В свою очередь, модель системы векторного управления (её нужно раскрыть двойным щелчком мыши), приведенная на рис. 4.3, состоит из следующих компонентов:
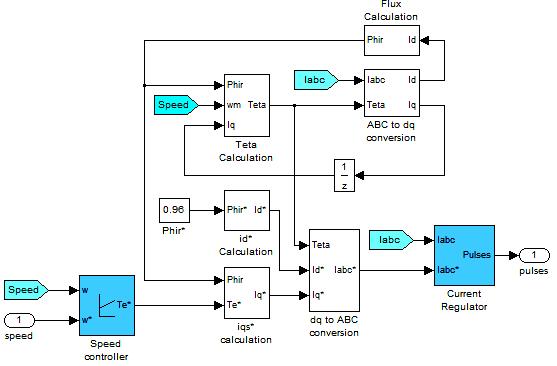
Рисунок 4.3 – Структурная схема модели системы векторного управления Vector Control
Гистерезисный трехфазный регулятор тока (Current Regulator), на вход которого подаются сигналы задания токов в фазах и сигналы обратной связи о фактических значениях токов, а в окне настройки можно указать ширину «токового коридора»;
Цифровой ПИ-регулятор скорости (Speed controller);
Блоки преобразования координат ABC to dq conversion и dq to ABC conversion, которые осуществляют преобразование трёхфазной неподвижной системы координат в двухфазную вращающуюся систему и наоборот;
Блок определения выходной частоты инвертора (Teta Calculation), который обеспечивает выполнение условия
 и
и
 (ориентирование оси
(ориентирование оси
 по потокосцеплению ротора);
по потокосцеплению ротора);Блок вычисления потока (Flux Calculator);
Блок задания потока (Fhir*);
Цифровой регулятор тока по оси (id* Calculation);
Блок вычисления тока по оси
 (iqs*
Calculation), который делит сигнал с выхода
регулятора скорости (Speed controler)
на вычисленный поток Phir
с выхода блока Flux Calculator.
(iqs*
Calculation), который делит сигнал с выхода
регулятора скорости (Speed controler)
на вычисленный поток Phir
с выхода блока Flux Calculator.
Процесс моделирования требует настройки блоков модели. Настройке подлежат следующие блоки: двигателя (Induction Motor), регулятора скорости (Speed controller), регулятора тока (Current Regulator), а также блоки задания управляющих и возмущающих воздействий.
При необходимости исследования оптимальных значений коэффициентов регулятора в нелинейных системах управления следует применять пакет прикладных программ Nonlinear Control Design (NCD) Blockset. Этот пакет реализует метод динамической оптимизации Зиглера-Николса.
Набор блоков пакета автоматически настраивает параметры моделируемых систем, основываясь на заланных пользователем ограничениях временных характеристик. Так как в цифровых системах управления расчетные процедуры задерживают сигналы управления во времени, то введение в систему элементов задержки Transport Delay вполне логично.
В работе с пакетом используется метод click and drag («щелкни и тяни»), который принят в Simulink.
С помощью пакета (NCD) Blockset можно выполнить:
интерактивную оптимизацию регуляторов;
моделирование объектов с запаздыванием;
моделирование схем подавления помех;
настройку регуляторов в условиях неопределенности параметров.
Основным блоком пакета является блок оптимизации NCD Outport. Пример его подключения для оптимизации параметров ПИД-регулятора показан на рисунке 4.4.
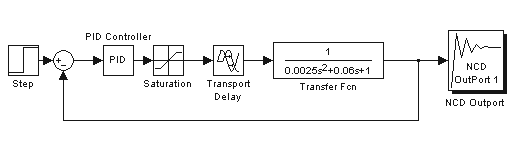
Рисунок 4.4 – Пример подключения блока оптимизации NCD Outport
Начальные значения параметров, подлежащих оптимизации, задаются в режиме командной строки MATLAB, остальные параметры вводятся в окнах настройки блока NCD Outport.