

1.2 Визначення граничних швидкостей різання та частот обертання шпинделя
Вихідним документом для створення коробки швидкостей є технічне завдання на станок, який ми проектуємо, в якому вказується область можливого використання верстата, перелік технологічних операцій, які виконуються на верстаті, а також перелік матеріалів для обробки деталей, припуски заготовок, можливий матеріал різального інструмента, потрібна продуктивність та тип виробництва, в якому буде використовуватись розроблюваний верстат. Виходячи з цього визначають: на якій операції і за якою обробкою яких матеріалів будуть мати місце граничні значення швидкостей різання та подач, а також величини зусиль різання з варіюванням виду використовуваного різального інструмента та його матеріалу. Крім цього, необхідно враховувати технічний прогрес в галузі удосконалення різальних інструментів та методів обробки, що потребує забезпечення резерву збільшення максимальних чисел на 20-25%.
Також треба враховувати місце верстата в типажі даної групи і можливість обробки деталей граничних розмірів з граничними швидкостями на суміжних верстатах даної групи.
Граничні значення швидкостей різання Vmax і Vmin визначають за формулою теорії різання або вибирають за довідниковими таблицями. Граничні значення чисел обертів nmax і nmin визначають за граничними розмірами оброблюваної деталі або за розмірами різальних інструментів:
![]() ;
;
![]() .
.
Відношення
![]() називається діапазоном регулювання
чисел обертів, який можна виразити як:
називається діапазоном регулювання
чисел обертів, який можна виразити як:
![]()
де DV – діапазон змін швидкостей різання;
DD – діапазон змін діаметрів оброблюваних деталей або різальних інструментів.
Граничні значення діаметрів оброблюваних деталей або різальних інструментів деяких верстатів регламентовані ГОСТом.
Для
економічного використання станків
приймаємо
![]() .
.
Максимальний діаметр обробки вказується в завданні або визначається через інший параметр. Так для токарних верстатів: Dmax =(1-1,5)H, де Н – висота центрів. Для фрезерних верстатів Dmax =(0,2-0,3)В, де В – ширина столу.
Для універсальних верстатів характерні такі діапазони регулювання [8]:
1. Токарні верстати 40...160;
2. Фрезерні 20...60;
3. Карусельні 25...40;
4. Радіально-свердлильні 20...100;
5. Стругальні 4...16.
Привод головного руху повинен забезпечувати можливість обробки деталей з різними діаметрами, забезпечуючи оптимальну швидкість різання.
Таким умовам може задовольняти привод з безступінчастим регулюванням чисел обертів шпинделя. Однак в теперішній час набули розповсюдження приводи головного руху з ступінчастим регулюванням, як простіші за конструкцією та експлуатацією, мають більш високий ККД та відносно низьку собівартість.
1.3 Вибір ряду частот обертання шпинделя
Визначивши граничні значення чисел обертів шпинделя nmax і nmin, необхідно вирішити питання про найвигідніший розподіл ступенів чисел обертів шпинделя в даному діапазоні. Розглянемо вирішення цього питання на прикладі так званої променевої діаграми з осями координат V-d (рис.1)
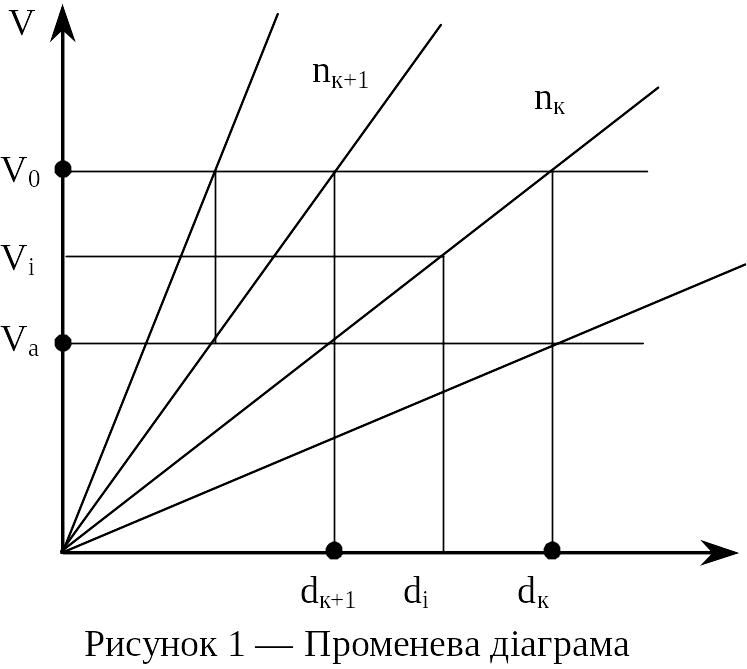
Частоти
обертання шпинделя визначаються
залежністю
![]() ,
в координатах V-d будуть виражатися
прямою лінією, яка проходить через
початок координат. Таким чином, для
обробки деталі діаметром dK
зі швидкістю V0
необхідно шпинделю надати частоту
обертання
,
в координатах V-d будуть виражатися
прямою лінією, яка проходить через
початок координат. Таким чином, для
обробки деталі діаметром dK
зі швидкістю V0
необхідно шпинделю надати частоту
обертання
![]() .
.
При обробці
деталі dK+1
з такою самою швидкістю частота обертання
шпинделя повинна дорівнювати
![]() .
.
Обробка деталей з діаметром d1, який знаходиться в межах від dK до dK+1, буде здійснюватися з числом nK, тобто зі швидкістю V1 < V0 (обробка деталей зі швидкістю більше розрахункової не рекомендується внаслідок зниження стійкості інструмента).
Максимальна
абсолютна втрата швидкості
![]() буде при
буде при
![]() .
.
Максимальна відносна втрата швидкості, виражена у відсотках, називається перепадом швидкостей
![]()
В коробці швидкостей із ступінчастим регулювання доцільно мати однаковий перепад швидкостей між різними частотами обертання, тобто А= const.
Ця умова
буде виконана, якщо відношення
![]() ,
а ряд частот обертання, який задовольняє
цю умову, є геометричною прогресією
(рядом) із знаменником:
,
а ряд частот обертання, який задовольняє
цю умову, є геометричною прогресією
(рядом) із знаменником:
![]() .
.
Частоти обертання у вигляді геометричного ряду можна записати:
![]()
де Z – число ступенів швидкості шпинделя.
Якщо
![]() ,
а
,
а
![]() ,
то діапазон регулювання можна виразити:
,
то діапазон регулювання можна виразити:
![]()
Звідки
знаменник геометричного ряду:
![]() ,
число швидкостей
,
число швидкостей
![]() .
.
Розташування частот обертання шпинделя по геометричному ряду зручне не тільки тим, що забезпечує постійний перепад швидкостей, але і дозволяє проектувати складні коробки швидкостей, які складаються із двох валових передач, побудованих по геометричному ряду.