

2.2 Побудова моделі за допомогою поліноміальної інтерполяції поліномом 7-го степеня
Побудова моделі за допомогою поліноміальної інтерполяції поліномом 7-го степеня виконуємо тим же способом як і для вхідного сигналу U(t), що описаний в другому розділі.
Нижче наведено лістинг програмного модуля в середовищі Matlab:
clear;
load data.mat
n=129;
for i=1:8;
for j=1:8;
A(i,j)=sum(n2t.^(i+j-2));
end;
end;
for i=1:8;
B(i)=sum(n2t.^(i-1).*n2wt);
end;
a=B/A;
t=1:150;
f=a(8)*t.^7+a(7)*t.^6+a(6)*t.^5+a(5)*t.^4+a(4)*t.^3+a(3)*t.^2+a(2)*t+a(1);
hPlot=plot(t,f);
hold on;
plot(n2t,n2wt,'red')
го степеня')
xlabel('t')
ylabel('W(t)')
axis([0,150,-0.5,6.5]);
set( hPlot, 'LineWidth', 2 );
Нижче наведемо графічну модель (рис. 2.1):
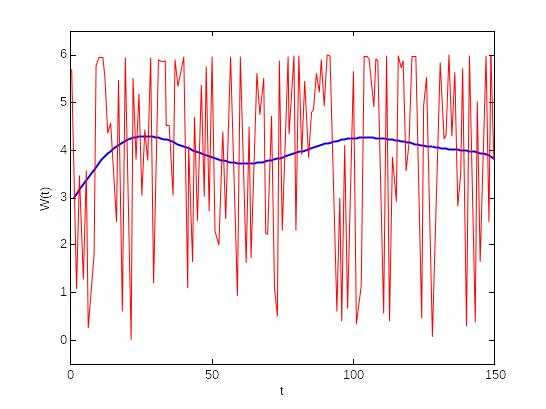
Рис. 2.1. Поліноміальна модель вхідного сигналу W(t) поліномом n-го порядку
Розв’язавши систему, отримаємо такі значення коефіцієнтів:
a0 = 2.8984;
a1 = 0.0876;
a2 = 0.00081;
a3 = -0.00023;
a4 = 0.0000039;
a5 = 0.000000041;
a6 = 1.9851551e-010;
a7 = -3.703921e-013.
2.3 Побудова моделі за допомогою полінома Чебишева
Побудова моделі за допомогою полінома Чебишева виконуємо тим же способом як і для вхідного сигналу U(t), що описаний в другому розділі.
Нижче наведено лістинг програмного модуля в середовищі Matlab:
clear;
load data.mat;
Cheb_por=7;
n=129;
fi=ones(n,7);
for i=1:n
fi(i,2)=n2t(i)-(1/n)*sum(n2t);
end;
for p=3:Cheb_por; i=1:n;
beta(p)=-sum(n2t(i).*fi(i,p-1).^2)/sum(fi(i,p-1).^2);
gama(p)=-sum(n2t(i).*fi(i,p-1).*fi(i,p-2))/sum(fi(i,p-1).^2);
fi(i,p)=(n2t(i)+beta(p)).*fi(i,p-1)+gama(p).*fi(i,p-2);
end;
A=fi'*fi;
B=fi'*n2wt;
a=A\B;
for i=1:n; j=1:7;
Cheb(i)=a(j)'*fi(i,j)';
end;
hPlot=plot(n2t,Cheb);
hold on;
plot(n2t,n2wt,'red');
xlabel('t');
ylabel('U(t)');
set( hPlot, 'LineWidth', 2 );
Нижче наведено модель досліджуваного об’єкта (рис. 2.2).
Розв’язавши систему, отримаємо такі значення коефіцієнтів:
a0 = 4.1045; a6 = 3.69918605e-012;
a1 = -0.2135; a7 = -3.70390824e-013.
a2 = 0.1228;
a3 = -0.0388;
a4 = 0.00000189;
a5 = 0.000000293;
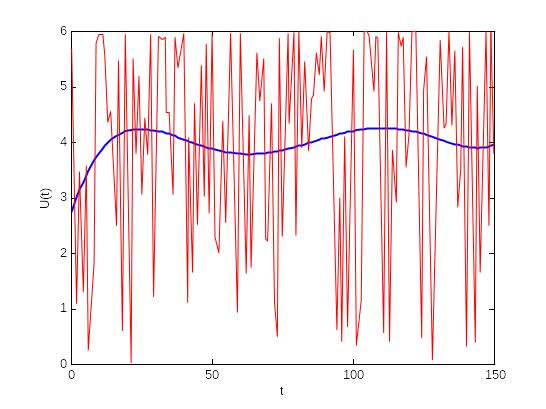
Рис. 2.2. Модель вхідного сигналу W(t), побудована поліномом Чебишева
2.4 Побудова моделі за допомогою перетворення Фур’є
Побудова моделі за допомогою перетворень Фур’є виконуємо тим же способом як і для вхідного сигналу U(t), що описаний в другому розділі.
Нижче наведено лістинг програмного модуля в середовищі Matlab:
clear;
load data.mat;
n=129;
Fur_por=4;
m=Fur_por;
for k=1:m+1
A=(1/n)*sum(n2wt);
B(k)=(2/n)*sum(n2wt.*cos(k*n2t));
C(k)=(2/n)*sum(n2wt.*sin(k*n2t));
end
for k=1:m+1
for i=1:n
FS(i,1)=A+sum(B(k)*sin(k*n2t(i))+C(k)*cos(k*n2t(i)));
end
end
plot(n2t,n2wt,'red')
hold on;
hPlot=plot(n2t,FS);
xlabel('t')
ylabel('W(t)')
axis([0,150,-0.5,6.5]);
set( hPlot, 'LineWidth', 2 );
Побудована модель представлена нижче, на рис. 2.3.
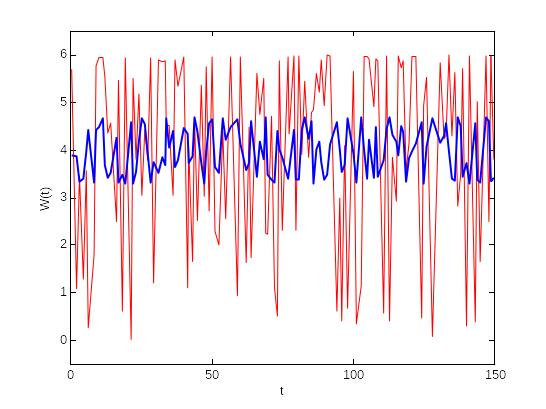
Рис. 2.3 - Модель вхідного сигналу W(t), побудована за допомогою перетворення Фур’є
Розв’язавши систему, отримаємо такі значення коефіцієнтів:
a0
= 3.9924; 
