

4.3 Побудова третьої моделі системи, виду
Y = a0 +bcos(U(t)) + dsin(W(t))
За допомогою методу найменших квадратів знаходимо систему рівнянь, розв’язавши яку можна отримати коефіцієнти а0, а1, та а2. За допомогою знайдених коефіцієнтів можна побудувати третю модель.
Система рівнянь буде мати вигляд:

Нижче приведемо лістинг модуля рішення даної системи:
clear;
load data.mat
for i=1:8;
for j=1:8;
A(i,j)=sum(n1t.^(i+j-2));
end;
end;
for i=1:8;
B(i)=sum(n1t.^(i-1).*n1ut);
end;
a1=B/A;
t=1:150;
f1=a1(8)*t.^7+a1(7)*t.^6+a1(6)*t.^5+a1(5)*t.^4+a1(4)*t.^3+a1(3)*t.^2+a1(2)*t+a1(1);
for i=1:8;
for j=1:8;
A(i,j)=sum(n2t.^(i+j-2));
end;
end;
for i=1:8;
B(i)=sum(n2t.^(i-1).*n2wt);
end;
a2=B/A;
f2=a2(8)*t.^7+a2(7)*t.^6+a2(6)*t.^5+a2(5)*t.^4+a2(4)*t.^3+a2(3)*t.^2+a2(2)*t+a2(1);
for i=1:8;
for j=1:8;
A(i,j)=sum(n3t.^(i+j-2));
end;
end;
for i=1:8;
B(i)=sum(n3t.^(i-1).*n3yt);
end;
a3=B/A;
f3=a3(8)*t.^7+a3(7)*t.^6+a3(6)*t.^5+a3(5)*t.^4+a3(4)*t.^3+a3(3)*t.^2+a3(2)*t+a3(1);
n=150;
Fur_por=3;
m=Fur_por;
for k=1:m+1
Am=(1/n)*sum(f3);
Bm(k)=(2/n)*sum(f3.*cos(k*f1));
Cm(k)=(2/n)*sum(f3.*sin(k*f2));
end
for k=1:m+1
for i=1:n
sysmod3(i)=Am+sum(Bm(k)*sin(k*f1(i))+Cm(k)*cos(k*f2(i)));
end
end
hPlot=plot(t,f3,'red');
hold on;
hPlot1=plot(t,sysmod3);
grid on;
xlabel('t')
ylabel('Y(t)')
set( hPlot,'LineWidth', 2 );
set( hPlot1,'LineWidth', 2 );
S3=sqrt((sum(f3-sysmod3)^2)/(n-2));
Розв’язавши її, знайдемо коефіцієнти а, b, c, які визначатимуть модель:
a0
= 2.3812; 
Нижче побудуємо графічне представлення моделі, на якому видно її співвідношення до реального об’єкта.
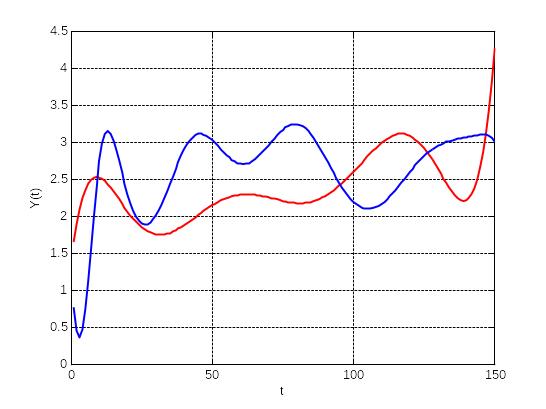
Рис. 4.3 – Загальна модель системи виду
Y = a0 +bcos(U(t)) + dsin(W(t))
4.4 Вибір оптимальної моделі
Вибір оптимальної моделі системи будемо здійснювати за тим самим критерієм, що й вибір оптимальних моделей для функцій U(t), W(t), Y(t).
Приведемо лістинг розрахунку:
S1=sqrt((sum(f3-sysmod1)^2)/(n-2));
S2=sqrt((sum(f3-sysmod2)^2)/(n-2));
S3=sqrt((sum(f3-sysmod3)^2)/(n-2));
Значення результатів розрахунків по критерію для моделей зведемо в таблицю:
Оптимальні значення моделей
Таблиця 4.1
Номер можелі |
S1 |
S2 |
S3 |
Значення критерію |
8.3959e-016 |
5.7935 |
2.9667 |
Отже, оптимальною моделлю є модель, що описується рівнянням виду:
Y = a0+a1 U(t)+a2W(t)
Висновок
Математична модель є наближеним описом будь-якого класу явищ зовнішнього світу, вираженим за допомогою математичної символіки. Математична модель - могутній метод пізнання зовнішнього світу, а також прогнозування і управління. Аналіз математичної моделі дозволяє проникнути в суть явищ, що вивчаються.
Метод математичного моделювання, що зводить дослідження явищ зовнішнього світу до математичних задач, займає ведуче місце серед інших методів дослідження, особливо в зв'язку з появою ЕОМ. Він дозволяє проектувати нові технічні засоби, працюючі в оптимальних режимах, для рішення складних задач науки і техніки; проектувати нові явища. Математичні моделі виявили себе як важливий засіб управління. Вони застосовуються в самих різних областях знання, стали необхідним апаратом в області економічного планування і є важливим елементом автоматизованих систем управління.
За допомогою використання математичного моделювання ми визначили можливості опису випадкових процесів математичними моделями різних видів. З чого було видно, що різні характеристики одного й того ж випадкового процесу мають різні адекватні моделі. Тому слід відмітити, що для опису характеристик випадкового процесу, для адекватності оцінки об’єкта чи система потрібно будувати декілька математичних моделей, з яких вибирати найбільш оптимальну. Але все рівно, складність об’єктів буває настільки великою, що навіть опис складними рівняннями не дасть повної відповідності та точності щодо реального об’єкта.