

Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Бузулукский гуманитарно-технологический институт
(филиал) государственного образовательного учреждения
высшего профессионального образования -
«Оренбургский государственный университет»
Кафедра общей инженерии
Т.Г. КОНОПЛЯ
Составление кинематических схем и структурный анализ плоских рычажных механизмов.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
К лабораторной работе № 1
Бузулук 2006
Содержание
Введение…………………………………………………………………… 1 Теоретическая часть……………………………………………………..
1.2 Общие сведения ……………………………………………………….
2 Составление кинематических схем и структурный анализ плоских рычажных механизмов…………………………………………………….
2.1 Цель работы…………………………………………………………….
2.2 Оборудование и инструмент………………………………………….
2.3 Порядок выполнения работы…………………………………………
3 Пример оформления отчета……………………………………
4 Контрольные вопросы………………………………………….
Список используемых источников……………………………...
Введение
В пособии изложены методические указания к выполнению лабораторной работы «Составление кинематических схем и структурный анализ плоских рычажных механизмов.»
Пособие написано в соответствии с лекционным курсом и поможет студентам в процессе выполнения лабораторных работ закрепить теоретические знания и приобрести практические навыки по составлению структурных и кинематических схем механизмов и проведению структурного анализа.
Объем учебного пособия содержит краткую теоретическую часть, поэтому подготовка к работе должна проводиться заблаговременно и включать изучение теоретического материала, изложенного в лекционном курсе, в основной и дополнительной литературе, рекомендованной преподавателем.
Отчеты по проделанной работе должны быть выполнены согласно приведенному примеру.
1 Теоретическая часть
Общие сведения
Механизмом называется совокупность подвижно соединённых между собой звеньев, совершающих под действием приложенных к ним сил, определённые целесообразные движения.
Звеном называют совокупность деталей, скреплённых друг с другом неподвижно. Название звеньев определяется видом их движения.
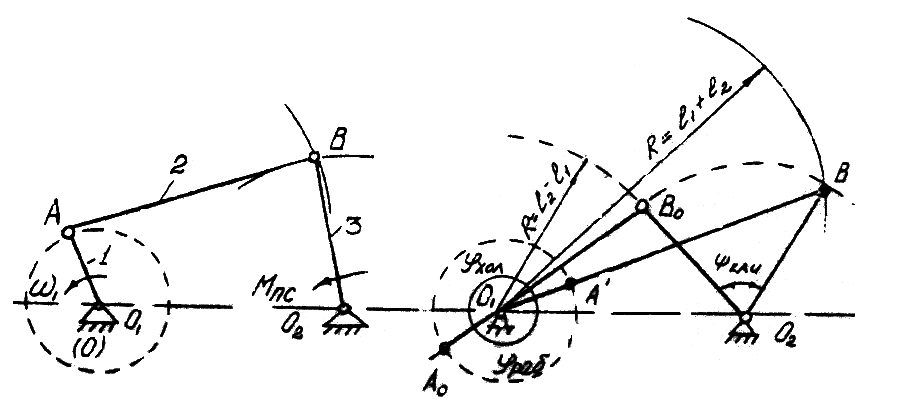
Кривошип – звено, совершающее полный оборот вокруг оси вращения (рис. 1.1а звено 1 – вокруг 01);
шатун – звено, совершающее сложное плоско-параллельное движение (звено 2);
коромысло–звено, совершающее качательное движение вокруг оси (звено3);
звено 0 – стойка.
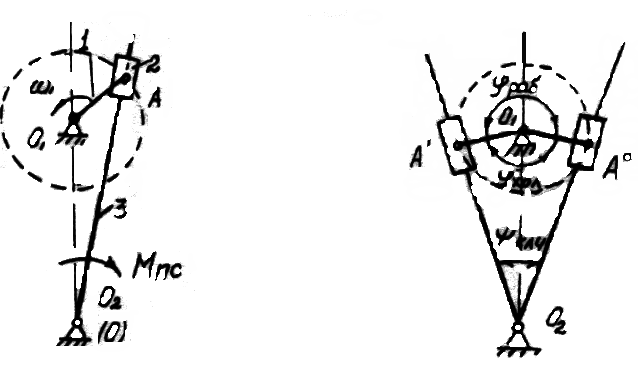
кулиса- звено, являющееся подвижной направляющей для ползуна (рисунок1.3 звено3).
ползун- звено, совершающее возвратно–поступательное движение.
Название механизма образуется из названий первого и последнего подвижных звеньев. Таким образом, на рис. 1.1а схема кривошипно-коромыслового механизма.
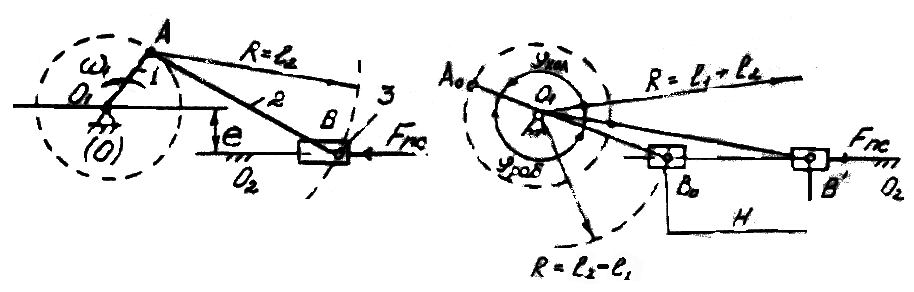
Рис. 1.2а -звено 1 – кривошип, звено 2 – шатун, звено 3 – ползун
а) б)
а) – построение плана положений;
б) – определение крайних положений.
Рисунок 1.1- Кривошипно-коромысловый механизм
а) б)
а) – построение плана положений;
б) – определение крайних положений.
Рисунок 1.2- Кривошипно-ползунный механизм
 а) б)
а) б)
а) – построение плана положений;
б) – определение крайних положений.
Рисунок 1.3- Кривошипно-кулисный механизм
Рисунок 1.3-звено 1 – кривошип, звено 2 – ползун, звено 3 – кулиса.
Подвижное соединение двух звеньев, допускающее их относительное движение, называется кинематической парой.
В зависимости от степеней свободы (количества возможных относительных движений) кинематические пары называются одноподвижными (Р1)- имеющие одну степень свободы (одно возможное движение); двуподвижными (Р2) - имеющие две степени свободы; трёхподвижные (Р3) – три степени свободы; четырёхподвижными (Р4) – четыре степени свободы и пятиподвижные (Р5) – пять степеней свободы.
Класс кинематической пары определяется числом связей (числом невозможных относительных движений).
Элементом кинематической пары называют место соприкосновения двух звеньев (точка, прямая, поверхность).
По виду элементов кинематической пары классифицируются на высшие – элементы точки, (Р5 и Р4 – кинематические пары I и II класса) и низшие – элементы поверхности (Р3, Р2 и Р1 – кинематические пары III, IV и V класса) Число степеней свободы (степень подвижности) плоского рычажного механизма определяется по формуле П.Л.Чебышева:
W = 3n – 2P1 (1.1)
Где n – число подвижных звеньев механизма;
P1 – число одноподвижных кинематических пар.
На рисунках 1.1, 1.2, и 1.3 механизмы имеют три подвижных звена и четыре одноподвижных кинематических пары:
W = 3n – 2P1 = 3 · 3 – 2 · 4 = 1
Степень подвижности механизма показывает количество ведущих звеньев.
Ведущее звено, то есть стойка и звено образующее одноподвижную кинематическую пару P1 – вращательную или поступательную, условно называют начальным механизмом І класса (рис. 1.4).
Группой Ассура называется открытая кинематическая цепь с нулевой степенью подвижности.
W = 3n – 2P1=0
Это возможно при следующем сочетании, когда n=2 P1=3. Группы, имеющие два подвижных звена и три одноподвижных кинематических пары, являются структурными группами II класса.
Структурные группы II класса:
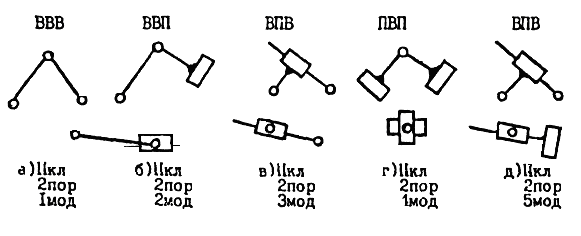
Рисунок 1.5
Присоединение диады 1-й модификации к начальному механизму І класса даёт кривошипно-коромысловый механизм.
Присоединение диады 2-й модификации даёт кривошипно-ползунный механизм.
Диады остальных модификаций с тем или иным начальным звеном дают кривошипно-кулисные механизмы.
Цель структурного анализа – определить число и название звеньев, число и класс кинематических пар, степень подвижности механизма, класс и порядок структурных групп, класс механизма в целом, формулу строения механизма (порядок сборки).
При проведение структурного анализа рекомендуется:
1)отсоединять структурные группы, начиная с наиболее удалённых от ведущего звена;
2)следить за тем, чтобы степень подвижности механизма до и после отделения каждой структурной группы оставалась неизменной;
3)помнить, что каждое звено и каждая кинематическая пара может входить только в одну структурную группу.
2 Составление кинематических схем и структурный анализ плоских рычажных механизмов.
2.1 Цель работы:
Научиться составлять кинематические схемы механизмов в соответствии с ГОСТ 2770-68 и проводить структурный анализ механизмов.
2.2 Оборудование и инструмент:
Модели механизмов, линейки, карандаши, ластики, журнал для лабораторных работ.
2.3 Порядок выполнения работы:
1. По выданной модели составить структурную схему данного механизма.
2.Обозначить на схеме кинематические пары, пронумеровать подвижные звенья, обозначить стойку.
3.Определить названия подвижных звеньев и занести их в таблицу 1.
4.Измерить с помощью линейки длины всех подвижных звеньев, расстояние между опорами и занести эти значения в таблицу 1.
5. Выбрать масштабный коэффициент, определить длины звеньев в масштабе и занести эти размеры в таблицу 1.
6.Вычертить кинематическую схему механизма по выбранному масштабному коэффициенту в журнал (рисунок- кинематическая схема).
7.Заполнить таблицу 2-кинематические пара и их классификация.
8.Определить степень подвижности механизма по формуле Чебышева.
9.Разделить механизм на группы Ассура и начальный механизм и заполнить таблицу 3.
10.Составить формулу сборки механизма. Данные брать из таблицы 3.
11.Составить отчет по лабораторной работе в индивидуальном журнале.