

18.Характеристики двигателя постоянного тока независимого возбуждения и режимы его работы.
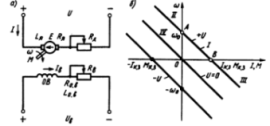
Режим х/х: Двигатель не получает энергии ни из электрической сети, ни с вала. В этом режиме I=0, E=U=kФω0, M=0, ω=ω0.
Двигательный режим (участок I характеристики) в диапазоне 0<ω<ω0, т.е. в первом квадрате, где ω и M совпадают по направлению. В этом режиме Е<U, I=(U-E)/R совпадает по направлению с направлением U и не совпадает с E, электрическая энергия поступает из сети, а механическая энергия с вала двигателя передается исполнительному органу.
Генераторный режим работы параллельно с сетью или торможение с рекуперацией энергии в сеть. На этом участке ω>ω0, поэтому Eбольше напряжения сети, ток и момент изменяю свои направления на противоположные.
Режим к.з. возникает при ω=0 и Е=0, в этом режиме, согласно I=Iкз=U/R электрическая энергия, поступает из сети, рассеивается в виде тепла в резисторах якорной цепи. Механическая энергия с вала ДПТ не отдается т.к. ω=0.
Режим генератора при его последовательномсоеденении с сетью торможение противовключением наступает при ω<0 (участок III характеристики). За счет изменения направления скорости Е также меняет свою направленноть. Ток в якоре совпадает по направлению с U и Е и определяется их суммарным действием, т.е. I=(U+I)/R.
Режим автонономного генератора или динамичского торможения возникает при включении двигателя по схеме 2. В этом случае ток в якоре протекает под действием Е и совпадает с ней по направлению.

9. Выбор эд для электропривода в различных режимах работы.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
1) Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, продолжительности включения, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
2) Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
3) Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
19.Установившееся движение электропривода и его устойчивость.
Установившееся
движение ЭП обусловлено равенством
моментов двигателя и рабочей машины ![]() ,
в этом случае динамический момент будет
равен нулю
,
в этом случае динамический момент будет
равен нулю ![]() .
.
Механическая характеристика
1 группа механизмов – момент сопротивления которых не зависит от скорости (кривая 1), например: лебедки, конвейеры с постоянной массой перемещаемого груза, механизмы подач некоторых металлорежущих станков.
2 группа механизмов – момент сопротивления которых зависит линейно от скорости (кривая 2), например: генератор постоянного тока независимого возбуждения при работе на постоянный резистор.
3
группа механизмов – имеет
нелинейно-возрастающую (вентиляторную)
характеристику, момент сопротивления
пропорционален квадрату скорости ![]() (кривая
3), например: вентиляторы, компрессоры,
центробежные насосы и другие центробежные
машины.
(кривая
3), например: вентиляторы, компрессоры,
центробежные насосы и другие центробежные
машины.
4 группа механизмов – имеет нелинейно-спадающую характеристику, момент сопротивления изменяется обратно пропорционально скорости, но не линейно. Обычно у этих механизмов мощность потребления остается постоянной (кривая 4), например, некоторые металлорежущие станки.