

12.Замкнутые системы эп с двигателем переменного тока.
1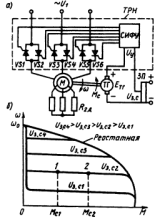 )
Замкнутая схема управления асинхронного
ЭП, выполненного по системе «тиристорный
регулятор напряжения-двигатель». Между
сетью и статором АД включен тиристорный
регулятор напряжения ТРН. Управляющие
электроды тиристоров подсоединены к
выходам СИФУ, которая распределяет
управляющие импульсы на тиристоры, и
осуществляет их сдвиг в зависимости
от входного сигнала управления Uу.
)
Замкнутая схема управления асинхронного
ЭП, выполненного по системе «тиристорный
регулятор напряжения-двигатель». Между
сетью и статором АД включен тиристорный
регулятор напряжения ТРН. Управляющие
электроды тиристоров подсоединены к
выходам СИФУ, которая распределяет
управляющие импульсы на тиристоры, и
осуществляет их сдвиг в зависимости
от входного сигнала управления Uу.
2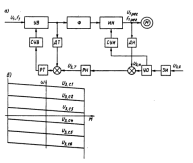 )
Замкнутые ЭП с частотным управлением
АД. Схема управления такого ЭП строится
по принципу подчиненного регулирования
координат и имеет два контура - внутренний
(тока) и внешний (напряжения). Регулирование
этих координат осуществляется
пропорционально-интегральными
регуляторами тока РТ и напряжения РН
по сигналам датчиков тока ДТ и напряжения
ДН. Преобразователь частоты обеспечивает
рабочие диапазоны изменения частоты
5…80Гцпри номинальной частоте 50Гц и
15…240Гц при номинальной частоте 200Гц.
)
Замкнутые ЭП с частотным управлением
АД. Схема управления такого ЭП строится
по принципу подчиненного регулирования
координат и имеет два контура - внутренний
(тока) и внешний (напряжения). Регулирование
этих координат осуществляется
пропорционально-интегральными
регуляторами тока РТ и напряжения РН
по сигналам датчиков тока ДТ и напряжения
ДН. Преобразователь частоты обеспечивает
рабочие диапазоны изменения частоты
5…80Гцпри номинальной частоте 50Гц и
15…240Гц при номинальной частоте 200Гц.
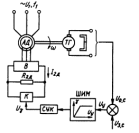
3) Замкнутая схема импульсного регулирования скорости АД с помощью резистора в цепи ротора.
В роторную цепь АД включен неуправляемый трехфазный выпрямитель В, к выходу которого подключен резистор R2д. Параллельно резистору включен управляемый ключ К, управление которым происходит от широко-импульсного модулятора ШИМ, на вход которого поступает сигнал Uэс и обратной связи Uос по скорости. При поступлении на вход блока ШИМ сигнала ошибки Uу=Uэс-Uос он начинает генерировать импульсы управления, которые с помощью схемы управления ключом СУК распределяются по тиристорам ключа К, вызывая периодическое включение и закорачивание резистора R2д.
13.Следящие эп постоянного и переменного тока.
Следящим назыв-ся ЭП, который обеспечивает (восрпоизводит) с заданной точностью движение исп-ого органа раб. машины в соответствии с произвольно изменяющимся входным сигналом упр-ия. Этот мех-ий или эл-ий сигнал чаще всего соответствует скорости или углу поворота оси или вала задающего ус-ва. Следящий ЭП прим-ся в антеннах радиотелескопов, системах спутниковой связи и т.д.
С игнал
поступает на входной датчик «1» и
преобр-ся в эл. сигнал, который идет на
измеритель согласования «2», который,
сопоставляя то, что есть, с тем, что
должно быть, отправляет сигнал
рассогласования U∆ в систему управления
ЭД «3», где этот сигнал преобразуется
в напряжение U, поступающее на двигатель
«4». ЭД с мех-ой передачей «4» обеспечивает
перемещение ИО «6». «5» - выходной датчик,
необходимый для корректировки сигнала,
поступающего на систему упр-ия «3».
игнал
поступает на входной датчик «1» и
преобр-ся в эл. сигнал, который идет на
измеритель согласования «2», который,
сопоставляя то, что есть, с тем, что
должно быть, отправляет сигнал
рассогласования U∆ в систему управления
ЭД «3», где этот сигнал преобразуется
в напряжение U, поступающее на двигатель
«4». ЭД с мех-ой передачей «4» обеспечивает
перемещение ИО «6». «5» - выходной датчик,
необходимый для корректировки сигнала,
поступающего на систему упр-ия «3».
В составе СП переменного тока используются двухфазные асинхронные двигатели (АДД).
Схема двухфазного АД
Достоинства АДД по сравнению с ДПТ.
1. Простота конструкции и изготовления.
2. Бесконтактность.
3. Меньший момент трения (меньший момент трогания).
Недостатки:
1. Большая масса.
2. Малый КПД.
14. Схема включения, статические характеристики и режимы работы синхронного двигателя.
С![]() инхронные
трехфазные двигатели (СД) широко
применяются в электроприводах самых
разнообразных рабочих машин и механизмов,
что объясняется их высокими
технико-экономическими показателямиСхема
включения СД на картинке
инхронные
трехфазные двигатели (СД) широко
применяются в электроприводах самых
разнообразных рабочих машин и механизмов,
что объясняется их высокими
технико-экономическими показателямиСхема
включения СД на картинке
Рисунок 4.6 – Механические характеристики СД:
а) пусковая; б) статическая
С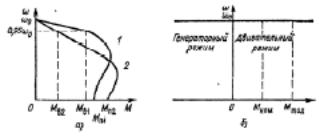 инхронный
двигатель может работать во всех
основных энергетических
инхронный
двигатель может работать во всех
основных энергетических
режимах, а именно: двигательном и генераторном при параллельной и последовательной работе с сетью и независимо от сети. При этом режим генератора последовательно с сетью (торможение противовключением) используется редко из-за того, что перевод СД в этот режим сопровождается значительными бросками тока и требует применения сложных схем управления.
Для осуществления торможения СД чаще используется генераторный режим при работе независимо от сети переменного тока (режим динамического
торможения). Для реализации этого режима обмотка статора СД отключается
от сети и замыкается на дополнительный резистор д R1. обмотка возбуждения продолжает питаться от источника, постоянного тока. Механические характеристики СД в этой схеме подобны характеристикам АД при динамическом торможении. При изменении д R1 и тока возбуждения в I получаются различные искусственные характеристики СД.