

1 0.Принципы построения замкнутых систем управления электроприводом.
Замкнутые структуры электрического привода строятся по принципам компенсации возмущений и отклонений, называемых также принципом обратной связи.
О![]() сновным
признаком замкнутой структуры
электрического привода является наличие
цепи, по которой на вход электропривода
вместе с задающим сигналом скорости
Uз.с. подается сигнал Uм=kмMс,
пропорциональный моменту нагрузки Мс.
В результате этого управления
электропривода осуществляется суммарным
сигналом U∆, который автоматически
изменяется в нужную сторону при
колебаниях момента нагрузки, обеспечивая
с помощью системы управления поддержание
скорости электропривода на заданном
уровне.
сновным
признаком замкнутой структуры
электрического привода является наличие
цепи, по которой на вход электропривода
вместе с задающим сигналом скорости
Uз.с. подается сигнал Uм=kмMс,
пропорциональный моменту нагрузки Мс.
В результате этого управления
электропривода осуществляется суммарным
сигналом U∆, который автоматически
изменяется в нужную сторону при
колебаниях момента нагрузки, обеспечивая
с помощью системы управления поддержание
скорости электропривода на заданном
уровне.
П![]() одавляющее
большинство замкнутых структур
электропривода строятся по принципу
отклонения (обратной связи). Он
характеризуется наличием цепи обратной
связи, соединяющей выход электропривода
с его входом. сигнал обратной связи
Uо.с=ko.c.w подается на вход электропривода,
где он вычитается из сигнала задания
скорости Uз.с..
одавляющее
большинство замкнутых структур
электропривода строятся по принципу
отклонения (обратной связи). Он
характеризуется наличием цепи обратной
связи, соединяющей выход электропривода
с его входом. сигнал обратной связи
Uо.с=ko.c.w подается на вход электропривода,
где он вычитается из сигнала задания
скорости Uз.с..
У![]() правление
электропр. осуществляется сигналом
отклонения UD=Uзс – Uос
правление
электропр. осуществляется сигналом
отклонения UD=Uзс – Uос
Все виды обратных связей делятся на положительные и отрицательные, линейные и нелинейные, жесткие и гибкие.
П называется такая обратная связь, сигнал которой направлен согласно (складывается) с задающим сигналом, в то время как сигнал О связи направлен ему встречно.
Ж обратная связь характеризуется тем, что она действует как в установившемся, так и в переходном режимах электропривода. Сигнал Г обратной связи вырабатывается только в переходных режимах электропривода и служит для обеспечения требуемого их качества, например устойчивости движения, допустимого перерегулирования и т.д.
Линейная обратная связь характеризуется пропорциональной зависимостью между регулируемой координатой и сигналом обратной связи Uо.с
11.Замкнутые системы эп с двигателем постоянного тока.
Для получения значительных диапазонов и высокой точности регулирования скорости, а так же для точного регулирования (или ограничения) тока и момента возможно обеспечить лишь в замкнутой системе П – Д «преобразователь-двигатель».
Замкнутая система П - Д с отрицательной обратной связью по скорости двигателя постоянного тока независимого возбуждения. Основу такой системы составляет разомкнутая схема П - Д. На валу ДПТНВ находится датчик скорости - тахогенератор ТГ, выходное напряжение которого UТГ=γω пропорционально скорости ДПТ и является сигналом обратной связи. Коэффициент пропорциональности γ называется коэффициентом обратной связи по скорости и может регулироваться за счет изменения тока возбуждения тахогенератора IвТГ.
![]()
![]()
При уменьшении момента нагрузки обратная связь будет действовать в другом направлении, приводя к снижению ЭДС преобразователя, благодаря наличию обратной связи осуществляется автоматическое регулирование
ЭДС преобразователя, а значит, и подводимого к ДПТ напряжения, за счет чего повышается жесткость характеристик ЭП.
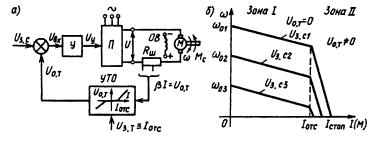
Регулирование (ограничение) тока и момента двигателя постоянного тока с помощью нелинейной отрицательной обратной связи по току. В качестве датчика тока в этой системе ЭП используется шунт с сопротивлением Rш, падение напряжения на котором пропорционально току якоря I. В результате сигнал обратной связи по току.
Uот=βI, где β - коэффициент обратной связи по току, Ом.
Замкнутые электроприводы с подчиненным регулированием координат.
Регулирование каждой координаты происходит в собственном замкнутом контуре и требуемые характеристики ЭП в статике и динамике можно получить за счет выбора схемы и параметров регулятора этой координаты и цепи ее обратной связи.