

5. Потери энергии при установившихся и переходных режимах эп. Способы снижения потерь в переходных режимах.
Выделяют два основных способа снижения потерь электроэнергии в переходных процессах: уменьшение момента инерции ЭП и регулирование в переходных процессах скорости идеального холостого хода двигателей ω0.
Уменьшение момента инерции ЭП возможно за счет снижения момента инерции применяемых электродвигателей, т.е.за счет использования малоинерционных двигателей, имеющих пониженный момент инерции якоря рационального конструирования механической передачи замены одного двигателя двумя, имеющими его половинную номинальную мощность.
Регулирование скорости идеального холостого хода двигателей постоянного тока обеспечивается изменением напряжения на якоре в системе «управляемый выпрямитель - двигатель», а АД - изменением частоты питающего напряжения в системе «преобразователь
частоты - АД» или числа пар полюсов в многоскоростном АД.
За счет изменения в переходном процессе скорости холостого хода происходит снижение потерь энергии в роторе, которое определяет снижение потерь в статоре и полных потерь в АД.
В![]() общем случае, если скорость идеального
холостого хода в переходном процессе
имеет n ступеней регулирования, потери
энергии в роторе уменьшатся в n раз:
общем случае, если скорость идеального
холостого хода в переходном процессе
имеет n ступеней регулирования, потери
энергии в роторе уменьшатся в n раз:
7. Регулирование частоты вращения дптнв изменением магнитного потока и сопротивления в цепи якоря.
Магнитный поток при регулировании скорости уменьшают по сравнению с номинальным за счет снижения тока возбуждения, т.к. его увеличение выше вышеноминального вызывает дополнительный нагрев обмотки возбуждения. Двигатель рассчитывается и конструируется таким образом, что бы его магнитная система была близка к насыщению, поэтому увеличение тока возбуждения не приводит к заметному увеличению магнитного потока.
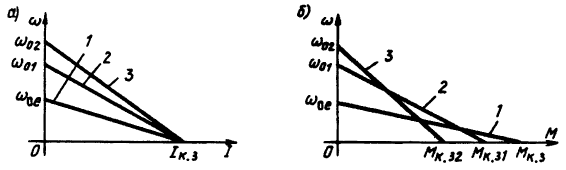
Уменьшение магнитного потока приводит к увеличению скорости идеального х/х ω0. Ток короткого замыкания Iк.з.=U/Rя, т.е. от магнитного потока не зависит и при его варьировании будет оставаться неизменным.Значит, электромагнитные характеристики будут иметь вид рис. а.
Момент короткого замыкания Мк.з.=kФIк.з., т.е. при уменьшении магнитног потока Ф он будет также снижаться, т.к. Iк.з.=const. Значит, механические характеристики двигателя будут иметь вид прямых(рис. Б).
Показатели данного способа регулирования: диапазон регулирования 3-4; направление регулирования – вверх от естественной характеристики; плавность регулирования определяется плавностью тока возбуждения; стабильность скорости достаточно высокая. Способ экономичен.
Диапазон регулирования скорости небольшой (2…3). Причина этого заключается в снижении жесткости характеристик по мере увеличения Rа. Направление регулирования скорости - вниз от естественной характеристики. Плавность регулирования скорости определяется характером изменения Rа. Если это сопротивление изменяется плавно, то данный способ обеспечивает плавное регулирование скорости. Чаще же рассматриваемый способ обеспечивает ступенчатое регулирование скорости. Стабильность скорости снижается по мере увеличения диапазона регулирования, т. к. уменьшается жесткость регулировочныххар-ик.
Потери мощности в цепи якоря ∆Pя определяются разностью мощностей: потребляемой из сети P1=Pэл=UI и полезной механической на валу P2=Рмех=Мω =>
∆Pя=UI-Mω=kФω0I-kФIω= kФω0I(ω0-ω)/ ω0=P1δ,
где δ=(ω0-ω)/ ω0 – относительный перепад скорости. При увеличении диапазона регулирования КПД снижается в большой степени.
Характеристика 1 соответствует случаю, когда Rа=0 и является естественной, искуственные характеристики 2-4 построены при наличии в цепи якоря резисторов с сопротивлениями соответственно Rд1<Rд2<Rд3.