1. Схема включения, статические характеристики и режим работы асинхронного двигателя.
П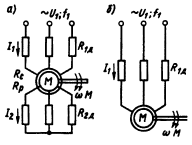 ервый
вариант предусматривает выполнение
обычной трехфазной обмотки из проводников
с выводами на три контактных кольца.(а)
ервый
вариант предусматривает выполнение
обычной трехфазной обмотки из проводников
с выводами на три контактных кольца.(а)
Второй вариант - это выполнение обмотки заливкой алюминия в пазы
ротора, в результате чего образуется конструкция, известная под названием «беличья клетка».(б)
В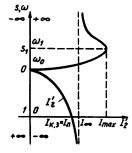 отличие от двигателей постоянного тока
электромеханическая
характеристика
асинхронного двигателя представляется
в виде зависимости тока ротора от
скольжения, что является особенностью
этого вида двигателя.
отличие от двигателей постоянного тока
электромеханическая
характеристика
асинхронного двигателя представляется
в виде зависимости тока ротора от
скольжения, что является особенностью
этого вида двигателя.
![]()
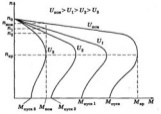
М еханическая
характеристика АД.
Потери мощности в цепи ротора, выраженные
через механические координаты АД,
представляют собой разность
электромагнитной и полезной механической
мощности:
еханическая
характеристика АД.
Потери мощности в цепи ротора, выраженные
через механические координаты АД,
представляют собой разность
электромагнитной и полезной механической
мощности:
![]()
Потери
мощности в роторе, выраженные через
электрические величины, определяются
как:
![]()
Механическая характеристика соответствует определенному чередованию фаз питающего напряжения сети U1 на зажимах статора АД. При изменении порядка чередования двух фаз АД будет иметь аналогичную механическую характеристику, расположенную симметрично относительно начала координат.
П![]() рименяются
две основные схемы замещения АД - более
точная Т-образная и упрощенная П-образная.
рименяются
две основные схемы замещения АД - более
точная Т-образная и упрощенная П-образная.
ЭДС
статора равна приведенной ЭДС ротора,
а ток намагничивания Im, определяющий
магнитный поток АД, протекает под
действием Uф по отдельной цепи, состоящей
из сопротивлений контура намагничивания
xm и Rm, и представляет собой векторную
сумму токов статора и приведенного
роторного, т.е.
![]() .
.
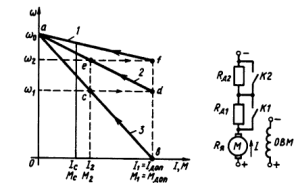
16 Пуск двигателя постоянного тока. Расчет резисторов, торможение и реверс.
Пуск двигателя сначала происходит по искусственной характеристике 1 с резистором Rд, называемым пусковым. В момент включения двигателя его ток и момент ограничиваются до заданного уровня I1=Iдоп и M1=Мдоп. По мере увеличения скорости и соответственно Е двигателя ток в якоре снижается, и при скорости ω1 резистор может быть закорочен. Двигатель переходит на работу по естественной характеристике 2, при этом броски тока и момента также не превышают заданного уровня. Завершается пуск двигателя после достижения им ωуст, определяемой точкой пересечения хар-к двигателя 2 и исполнительного органа 3.
Динамическое торможение происходит по хар-ке 4 замыканием якоря на резистор Rд. Его сопротивление находится по заданным значениям Iдоп или Mдоп, определяемым замедлением ЭП или условиями коммутации двигателя.
Реверс и торможение противовключением ДПТНВ, осуществляемые изменением полярности напряжения якоря или обмотки возбуждения, происходит по хар-ке 5 при включении в цепь якоря резистора Rд.
Совокупность 2-х или более искусственныххар-ик, используемых при пуске двигателя, называется пусковой диаграммой.
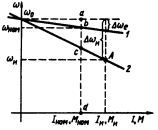
Метод
пропорций
основывается на формуле
![]() для определения перепада скорости.
Запишем отношение перепадов скорости
при токе Iн
и моменте Mн
на естественной Δωе и желаемой
исскуственной Δωи характеристиках:
для определения перепада скорости.
Запишем отношение перепадов скорости
при токе Iн
и моменте Mн
на естественной Δωе и желаемой
исскуственной Δωи характеристиках:
![]() ,
откуда
,
откуда
![]()
Полученная формула позволяет рассчитать сопротивление добавочных резисторов при расположении заданной точки в любом квадранте.
Метод отрезков в отличие от метода пропорций не требует использования данных о собственном сопротивлении якоря двигателя, которое не всегда указывается в паспорте, а позволяет определить его по известной естественной характеристике.
![]()
![]()
![]()
Так же можно рассчитать посредством измерения сопротивления между щетками двигателя, по приближенной формуле:
![]()