

2.2.2.2. Модели календарных планов
В настоящее время в практике планирования применяются различные методы представления календарных планов, которые соответствуют различным моделям календарного планирования.
Все эти модели и методы можно разбить на три большие группы |29]:
— аналитические (математические);
— табличные (матричные);
— графические.
Аналитические модели относятся к числу наиболее общих и компактных моделей планирования. Они, как правило, отражают свойства, присущие целому классу процессов, и поэтому оказываются исключительно полезными как при исследованиях, так и при проектировании различных процессов.
По виду используемого математического аппарата, применяемого при исследовании аналитических моделей, различают:
115
-модели математического программирования;
- модели теории массового обслуживания:
- модели динамического программирования.
Под общей задачей математического программирования обычно понимается задача максимизации целевой функции:

Если функции f и g - линейные, то поставленная задача (2.1, 2.2) является задачей линейного программирования.
Модели линейного программирования применяются в календарном планировании, в основном, для распределения однотипных работ по группам взаимозаменяемого оборудования - в задачах объемного планирования.
Если x - целые, то модель (2.1. 2.2) является моделью целочисленного программирования. К этим задачам сводятся многие задачи календарного планирования.
Если f либо g, - нелинейные, то модель (2.1. 2.2) является задачей нелинейного программирования.
Несмотря на то, что многие задачи календарного планирования сводятся к моделям нелинейного программирования, эти модели редко применяются в силу отсутствия эффективных методов решения задач нелинейного программирования.
Модели теории массового обслуживания, опирающиеся на аппарат теории вероятностей, очень широко применяются при изучении стационарных процессов, - при планировании крупносерийного и массового производства.
Типичным примером задачи массового обслуживания является задача определения оптимального количества наладчиков для автоматической линии. Однако некоторые модели теории массового обслуживания могут применяться и в мелкосерийном производстве. В частности, модель распределения нарядов на участке мелкосерийного производства может быть построена с использованием теории очередей.
Модели динамического программирования, в. основу которых поломи принцип оптимальности Р. Беллмана (принцип гласит: оптимальное управление обладает тем свойством, что каковы бы ни были начальное состояние системы и управление в начальный момент времени, последующее управление должно быть оптимальным относительно состояния, возникшего и результате первоначального управления), отражают процессы, протекающие во времени, и поэтому также могут использоваться для описания задач календарного планирования.
Табличные модели позволяют в компактной форме в виде таблиц или матриц отразить структуру (т.е. взаимосвязи между отдельными операциями) п временные параметры моделируемого процесса.
Достоинством рассмотренных моделей и методов их получения является их компактность, возможность оперировать с большим объемом исходных данных, чему способствовало широкое распространение и применение ЭВМ для решения задач планирования.
Недостатком рассмотренных моделей является то, что не все реальные процессы, протекающие в организационных системах, поддаются формализации. Кроме того, существенным недостатком данных моделей является отсутствие наглядности представления планов.
Наиболее широкое распространение в практике планирования, в том числе планирования ТЭП в СВТС, получили графические модели календарного планирования.
К графическим моделям календарного планирования относятся:
-планировочный (линейный) график;
- ленточный график-хронограмма, который может сопровождаться графиком занятости личного состава;
- график Ганта (Гант - карта), который позволяет удобно отражать технологические процессы по рабочим местам;
- сетевой график.
Для иллюстрации возможностей различных графических моделей следует рассмотреть конкретный пример планирования ТЭП. а именно: процесса технического обслуживания изделия СВТС.
В качестве исходных данных для построения графической модели календарного планирования, как в общем случае, так и при любых других моделей, используется словесная (вербальная) формулировка задачи.
Предполагается, что необходимо выполнить техническое обслуживание подвижной дизельной электростанции. Обслуживанию подлежат: шасси агрегата, топливный бак, агрегатный отсек, где расположены дизель - генераторы; и операторный отсек, где размещается оборудование управления электростанцией и вспомогательное оборудование.
Работы на агрегате начинаются с распломбирования агрегата, а завершаются - пломбированием агрегата. Работа по проверке ЗИП проводится после обслуживания шасси и замены аккумуляторных батарей. В свою очередь, проверка работы дизель - агрегатов может проводиться после обслуживания составных частей агрегата, а проверка эксплуатационной документации, - после проверки работы дизель - агрегатов.
Составляется план работы по техническому обслуживанию подвижной дизельной электростанции с использованием разных графических моделей календарного планирования.
А. Планировочный (линейный) график представляет собой схематическое изображение технологического процесса.
Планировочный график строится следующим образом: для каждой работы в графике отводится отдельная строка; в этой строке записывается наименование работы, обозначение работы (ее код, шифр), исполнители или количество исполнителей и проводится линия в соответствующем масштабе времени, указывающая продолжительность выполнения работы и привязку работы к текущему времени.
Для определения продолжительности каждой работы необходимо знать трудозатраты Фто на ее проведение и количество исполнителей n.
Тогда продолжительность работы tp определяется соотношением:
![]()
Количество исполнителей обычно определяется технологией работы. Есть такие операции, где обязательно присутствие нескольких исполнителей. Продолжительность отдельных работ можно регулировать нарядом на эту работу меньшего или большего количества исполнителей.
Для рассматриваемой задачи задают количество исполнителей каждой работы и определяют ее продолжительность согласно формуле (2.3).
Образец планировочного (линейного) графика для рассматриваемой задачи представлен на рис.2.5, где введены обозначения, указывающие принадлежность исполнителей: РШ расчет шасси; РСЧ - расчет специальной части.
Ленточный график-хронограмма предназначен для учета времени и трудозатрат на выполнение ТЭП или одной операции.
В этом графике по горизонтальной оси наносится равномерная шкала времени, а по вертикальной оси, - перечень операций (работ) или их коды (шифры). Операции наносятся на графике в виде лент (горизонтальных отрезков) в том месте шкалы времени, где планируется их выполнение. Площадь ленты пропорциональна трудозатратам на выполнение данной операции в чел.-ч. Часто на этих лентах указывается объем работ, число исполнителей, их специальности и другие данные.
Вариант ленточного графика-хронограммы для рассматриваемой задачи представлен на рис. 2.6,а. Если сложить ординаты лент, то получают ступенчатый график занятости личного состава (рис. 2.6,6). Этот график может использоваться как самостоятельно, так и вместе с ленточным графиком.


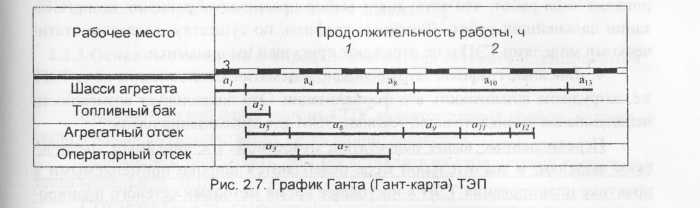
График Ганга (Гант-карта) представляет собой хронограмму, которая, в отличие от рассмотренных линейных графиков, позволяет получать распределение операций ТЭП не только по времени, но и по месту их выполнения (рабочим местам).
Вариант Г ант- карты для рассматриваемой задачи представлен на рис. 2.7.
Рассмотренные графические модели еще используются в эксплуатационной документации на изделие СВТС и применяются для планирования ТЭП, содержащих небольшое количество операций. Достоинства их очевидны.
Линейные графики просты в составлении и использовании, весьма наглядны, — позволяют легко определить работы, которые должны выполняться в каждый момент времени.
Вместе с тем линейным графикам присущи недостатки, которые ограничивают возможность их применения для планирования сложных ТЭП, каковыми они чаще всего и бывают.
К числу таких недостатков относятся:
1.Линейные графики, не отражающие в полном объеме взаимосвязи отдельных операций (работ). Это нередко приводит к тому, что источники потенциальных затруднений оказываются незамеченными, что, в конечном плане, может привести к удлинению сроков выполнения работ. Иными словами, по этим графикам порой трудно утверждать, какие операции графика являются главными, определяющими весь ход процесса, а какие, - второстепенными.
2. Линейные графики, не учитывающие неопределенности, объективно присущему любому и. особенно, новому процессу. В этих графиках состав и сроки выполнения операций указываются однозначно, хотя не всегда представляется возможность это сделать. Эти графики представляют чисто волевой, директивный характер.
Такое игнорирование неопределенностью процесса приводит зачастую к отрицательным последствиям. Иногда бывает трудно отразить динамичность ТЭП скорректировать весь график при задержке какой-либо операции, выявить, как изменятся (и изменяются ли вообще) сроки завершения других работ при этом, и что необходимо сделать, чтобы не передвинулся срок выполнения всего ТЭП.
3. Линейные графики, имеющие ограниченные возможности прогнозирования хода работ, что затрудняет выбор правильного решения по организации дальнейших работ. Линейные графики, по существу, являются статическими моделями ТЭП и не отражают присущей им динамики.
4. Линейные графики, затрудняющие математическое описание хода ТЭП, т.е. затруднена возможность его формализации. Это ликвидирует возможности использования вычислительной техники, ЭВМ для оптимизации плана.
Перечисленные выше недостатки, относящиеся к линейным графическим моделям, в значительной мере ослабляются широко применяемыми в практике планирования ТЭП в настоящее время методами сетевого планирования и управления (СНУ).
Основным плановым документом метода СПУ является сетевой график (Сгр) или просто сеть.
Данная графическая модель позволяет:
- четко и наглядно отобразить взаимосвязи работ, определив при этом события, свершение которых необходимо для достижения поставленной цели;
- выявить критические работы или их совокупность, целесообразные пути использования имеющихся резервов, а также резервы времени;
- применить эффективные алгоритмы оптимизации распределения ресурсов по работам и оптимизировать их технологическую последовательность с использованием ЭВМ;
- осуществить оперативное управление ТЭП.
Достоинства метода СПУ наиболее полно проявляются при осуществлении сложных комплексов работы, таких, как разработка и испытания СВТС, строительство и ввод в эксплуатацию СВТС, проведение технического обслуживания на объектах СВТС и др.
Метод СПУ появился в 1958 году в США для управления разработкой и строительством некоторых больших технических систем и очень быстро получил широкое распространение за рубежом.
В 1966 году в соответствии с постановлением Совета Министров СССР он был рекомендован для внедрения в управление народным хозяйством нашей страны.
В 1967 году лаборатория СПУ полигона "Байконур" составила инструкции по разработке Сп, для воинских частей, впервые приступающих к использованию метода СПУ для планирования ТЭП.
С этого времени сетевые модели прочно вошли в жизнь войск.
Целесообразно рассмотреть основные понятия и определения метода СПУ, порядок разработки, построения и анализа Сгр.