

7.5. Поршневые вибровозбудители
Поршневые гидравлические и пневматические вибропреобразователи сообщают колебания рабочему органу вибромашины либо за счет использования пульсирующего источника рабочей жидкости, либо прерывания потока постоянного расхода с помощью золотниковых устройств. Золотниковые устройства могут управляться внешним приводо самим вибратором в соответствии с положением его исполнительного органа.
По принципу действия поршневые вибраторы делятся на пульсаторные, автоколебательные, следящие и самоуправляющиеся.
Пульсаторные вибраторы построены по принципу возбуждения колебаний исполнительного органа пульсирующим давлением, которое создается переменным потоком рабочей жидкости. Находят применение пульсаторные вибраторы с протоком рабочей жидкости, имеющие замкнутый рабочий объем. Используются гидровибраторы одностороннего и двустороннего действия. В первых рабочая жидкость совершает работу только за время прямого хода, а обратный ход осуществляется под действием упругой системы вибромашины. В вибраторах двустороннего действия обратный ход происходит также под действием рабочей жидкости.
Следящий гидравлический вибропривод имеет жесткую отрицательную обратную связь по перемещению между распределителем потока и рабочим органом машины.
В автоколебательных и самоуправляющихся вибраторах возмущающая сила периодически создается при питании от магистрали постоянного давления специальной системой, осуществляющей автоматически подвод и отвод рабочей жидкости. Поршень или мембрана цилиндра сами управляют движением распределительного золотника, обеспечивая непрерывность возвратно-поступательного движения.
В автоколебательных вибраторах колебания возбуждаются из-за наличия в системе нелинейного элемента – зазора. В самоуправляющихся вибраторах колебания генерируются специальными устройствами, обеспечивающими переключения управляющего золотника в момент нахождения поршня или мембраны в крайнем положении. Частота колебаний вибраторов этого типа регулируется подводимым давлением, амплитуда – величинами зазора в обратной связи автоколебательного вибратора или смещения упоров переключающих устройств самоуправляющихся вибраторов.
По принципу возбуждения пульсаторные вибраторы делятся на две группы: с насосами-пульсаторами и с распределителем потока – генератором пульсаций. В качестве распределителей потока используются вращающиеся или наступательно движущиеся золотники, имеющие привод от внешнего двигателя. Частота колебаний вибратора регулируется скоростью вращения или возвратно-поступательного движения распределителя потока. Амплитудой управляет изменение давления рабочей жидкости.
Схема принципиального устройства пульсаторного гидравлического вибратора двустороннего действия с насосом-пульсатором для создания гармонических колебаний приведена на рис. 81, а.
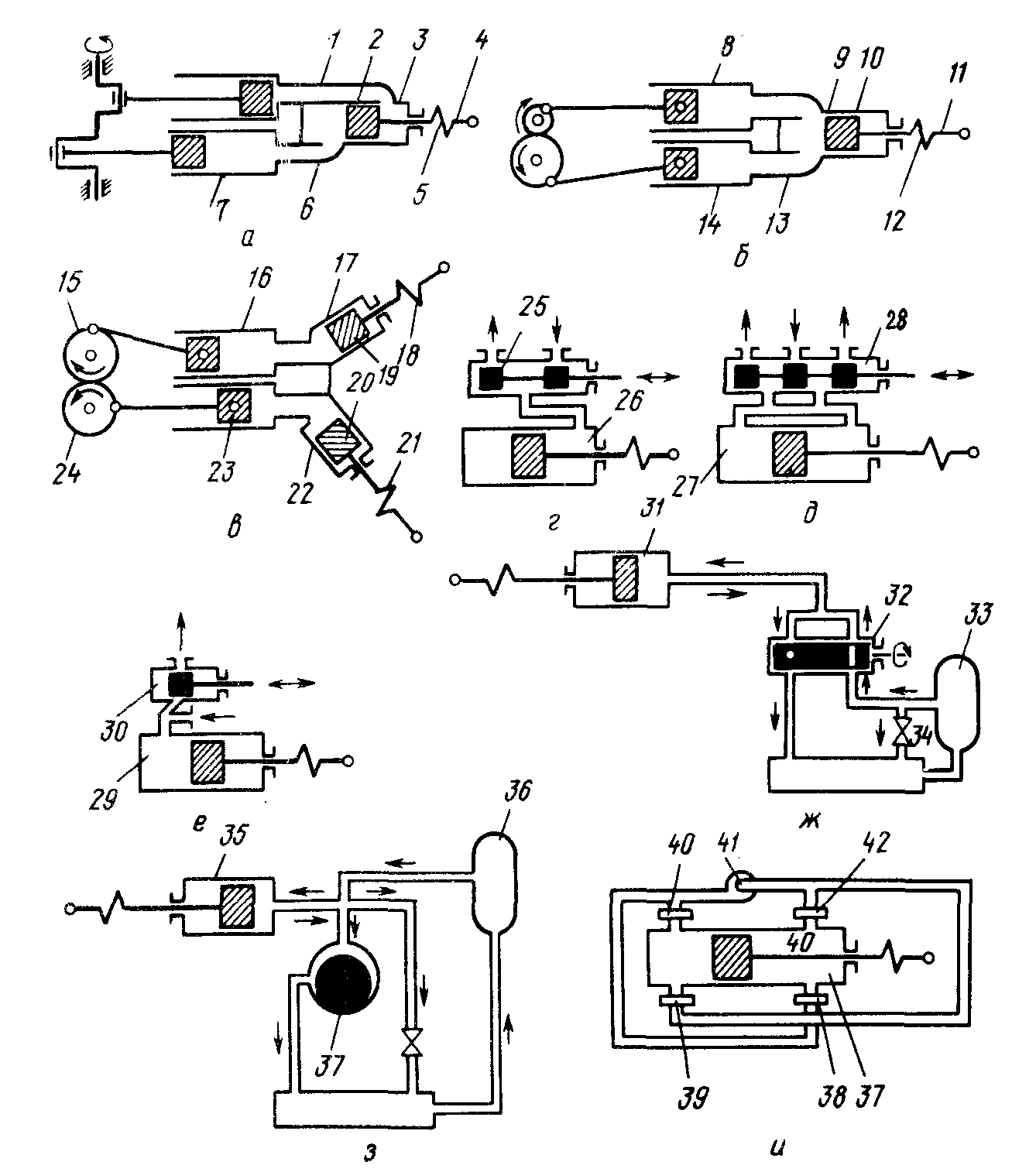
Рис. 83. Принципиальные схемы гидравлических вибраторов
Вибратор состоит из рабочего цилиндра 3, в котором перемещается поршень 2 под напором рабочей жидкости, подаваемой двухпоршневым пульсатором 7 или пульсатором другого типа. Пульсатор в первую половину хода подает рабочую жидкость с одной стороны поршня (патрубок 1) и откачивает с другой (патрубок 6). Во второй половине хода направление подачи жидкости меняется. Колебательная система соединяется с поршнем вибратора штоком 4 с упругим элементом 5. Упругий элемент в этом случае нужен для придания системе необходимых степеней подвижности.
Одним из наиболее существенных недостатков поршневых вибраторов является утечка рабочей среды в процессе работы через технологические зазоры между поршнем и цилиндром, уплотнением и штоком. Находит применение вибратор без пар скольжения, лишенный этого недостатка. В таких вибраторах применен вместо поршня резиновый упругий элемент, работающий на сдвиг. Достоинством этой конструкции является органическое сращение вибродвигателя с упругой системой, что позволяет создать универсальный агрегатный вибропривод.
Для создания бигармонических колебаний используется поршневой вибратор с двухпоршневым пульсатором, один из поршней которого вращается с удвоенной частотой (рис. 81, б). Вибратор состоит из цилиндра 9, в котором перемещается поршень 10, шток которого 11 имеет упругий элемент 12, Рабочая жидкость подается к цилиндру двухпоршневым пульсатором 14 через патрубки 8 и 13. Вследствие того что расход жидкости каждого цилиндра пульсатора суммируется в рабочем цилиндре гидровибратора, поршень последнего движется по бигармони-ческому закону.
Схема принципиального устройства пульсаторного поршневого вибратора одностороннего действия для создания эллиптических колебаний приведена на рис. 81,в. Он состоит из двух рабочих гидроцилиндров 17, 22, раздвинутых под прямым углом, в которых перемещаются поршни 19, 20 под напором рабочей жидкости, подаваемой двухпоршневым пульсатором, поршни 16, 23 которого перемещаются со сдвигом по фазе эксцентриковыми механизмами 15, 24, синфазно вращающимися с одинаковыми угловыми скоростями. Поршни через штоки с упругими элементами 18, 21 сообщают колебательной системе перемещения во взаимно перпендикулярных направлениях.
Основным достоинством пульсаторных вибраторов является жесткость амплитудно-частотной характеристики.
Регулирование режимов работы пульсаторных поршневых вибраторов осуществляется изменением как частоты, так и амплитуды колебаний. Частота колебаний регулируется путем изменения скорости вращения вала пульсатора, амплитуда колебаний - производительностью пульсатора.
К числу наиболее серьезных недостатков пульсаторных приводов относится нагрев рабочей жидкости, обусловливаемый замкнутостью ее обмена на участке поршень пульсатора — поршень вибратора.
Вибрационный привод пульсаторного типа одностороннего действия с поступательно движущимся золотником приведен на рис. 81,г. Он состоит из цилиндра 26 и золотника 25, который периодически соединяет рабочую полость то с напорной, то со сливной магистралями. Вибратор двустороннего действия, состоящий из цилиндра 27 и золотника 28, приведен на рис. 81,д. Золотник периодически соединяет одну рабочую полость цилиндра со сливной и в это же время - вторую рабочую полость с напорной магистралью, затем направление движения рабочей жидкости меняется. На рис. 81,е представлен вибратор, состоящий из цилиндра 29 и золотника 30, который управляет сливом рабочей жидкости.
Принципиальная схема поршневого вибрационного привода пульсаторного типа с золотником — генератором пульсации на входе приведена на рис. 81,ж. Привод состоит из насоса 33 постоянной или регулируемой производительности, который подает рабочую жидкость на вход золотника 32 и цилиндра 31. Золотник может быть выполнен, например, в виде вращающейся пробки с рядом отверстий, расположенных таким образом, что за один оборот полость цилиндра-вибратора 11 соединяется попеременно то с напорной магистралью, то со сливной. При этом в полости вибратора создается пульсация давления, обусловливающая возвратно-поступательные перемещения поршня. Регулирование амплитуды колебаний осуществляется с помощью регулятора давления 34, регулирование частоты - изменением скорости вращения золотника. Для привода золотника могут быть использованы регулируемые гидромоторы, механические вариаторы, двигатели постоянного тока малой мощности, так как золотник является лишь управляющим элементом.
В рассмотренном пульсаторном приводе давление перед золотником поддерживается постоянным и определяется характеристикой насоса. В полость цилиндра-вибратора рабочая жидкость подается отдросселированной в каналах золотника с давлением, зависящим от угловой скорости вращения золотника. Дросселирующие сопротивления золотника в связи с выходящей из цилиндра-вибратора рабочей жидкостью незначительны, и характер изменения давления в рабочей полости гидроцилиндра будет определяться гидравлическими сопротивлениями сливной магистрали и динамическими характеристиками колебательной системы, в паре с которой работает поршневой привод.
Этой схеме привода свойствен характерный недостаток, заключающийся в том, что при увеличении сопротивлений в колебательной системе, обусловливающем рост давления в цилиндре вибратора, уменьшается перепад давления в дросселирующем канале золотника, снижается расход рабочей жидкости, вследствие чего амплитуда колебаний с увеличением нагрузки уменьшается, т. е. привод имеет недостаточно жесткую характеристику. Поршневой вибропривод с золотником на выходе рабочего цилиндра-вибратора имеет значительно более жесткую нагрузочную характеристику.
Принципиальная схема пульсаторного вибропривода приведена на рис. 81,з. Привод состоит из насоса 36 (постоянной или регулируемой производительности), который подает рабочую жидкость в полость цилиндра-вибратора 35. На выходе цилиндра-вибратора в сливной магистрали гидросистемы установлен золотник с вращающейся пробкой 37. При вращении пробки, выполненной по специальному профилю, изменяется величина проходной щели золотника и в полости цилиндра-вибратора возникает пульсация давления. Частота пульсации регулируется изменением скорости вращения пробки золотника, амплитуда — с помощью дросселя 32 или изменением производительности насоса. Рабочая жидкость, подаваемая насосом, поступает в цилиндр и сливной бак через золотник и дроссель. Если дроссель полностью перекрыт, то амплитуда колебаний поршня будет зависеть только от пропускной способности золотника.
Пробку золотника можно спрофилировать таким образом, чтобы в течение большей части прямого хода поршня цилиндра-вибратора золотник был полностью перекрыт. В этом случае (при достаточном давлении насоса) амплитуда поршня при прямом ходе не зависит от величины сопротивлений в колебательной системе. Когда поршень совершает обратный ход под действием восстанавливающих сил упругих связей колебательной системы, золотник имеет достаточное отверстие для пропускания суммарного расхода рабочей жидкости, подаваемой насосом и поступающей из цилиндра-вибратора. Поскольку в рассмотренном приводе амплитуда установившихся колебаний определяется величиной прямого хода поршня цилиндра-вибратора, он будет иметь достаточно жесткую нагрузочную характеристику.
Поршневой вибропривод пульсаторного типа с золотником-генератором несложен по конструкции, допускает сравнительно простое регулирование по амплитуде и частоте колебаний; пульсации от одного насоса могут передаваться на поршни желаемого числа цилиндров-вибраторов .
С точки зрения уменьшения инерционности системы управления представляет интерес новая конструкция гидравлического вибратора пульсаторного типа, в котором регулирование направлением движения рабочей жидкости осуществляется электрической системой управления. В вибраторе в качестве рабочей жидкости используется специальная среда, имеющая способность мгновенно затвердевать при воздействии на нее электростатического поля.
Схема гидровибратора с электрической системой управления приведена на рис. 81,и. Он состоит из гидроцилиндра (двустороннего действия) 37. Рабочая жидкость подводится в рабочую полость гидроцилиндра при помощи четырех электростатических управляющих устройств 38, 39, 40,42 от насоса 41. При включении управляющего устройства движение рабочей жидкости через него прекращается. Гидромагистраль запроектирована так, что при включении одной пары гидрораспределителей (2, 1 или 7, 6) одна полость гидроцилиндра соединяется с напорной магистралью, вторая — со сливной. При переключении гидрораспределителей направление движения рабочей жидкости меняется.
Гидравлический вибропривод наиболее пригоден для использования в виброустановках, требующих значительной мощности возбуждения при ограниченных габаритах конструкции. Гидровибраторы могут создавать значительные возмущающие усилия и раэмахи колебаний. Недостатком гидравлических вибровозбудителей следует считать сравнительно большую сложность конструкции, нагрев и утечку рабочей жидкости. Пневматические вибраторы просты по конструкции и применяются на предприятиях, имеющих сжатый воздух, особенно в условиях, где важна взрывобезопасность привода.
На практике наибольшее распространение имеют гидравлические вибраторы пульсационного действия. Гидравлический привод этого типа состоит из пульсатора, приводного двигателя, осуществляется от основного двигателя через вал пульсатора и муфты (рис. 82).
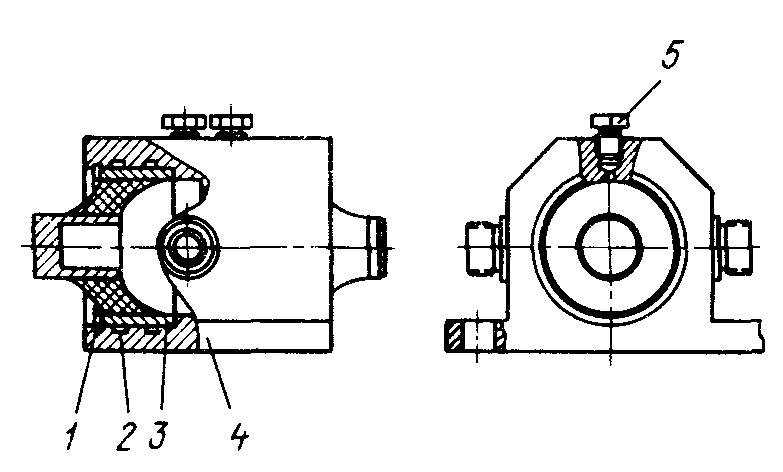
Рис. 82. Конструкция гидроцилиндра с резиновыми мембранами
Двухпоршневой гидропульсационный привод с оппозитным расположением цилиндров имеет раму-бак 1, на которой смонтированы электродвигатель 2, гидропульсатор 3, подгшточный насос 4 и блок управления5. Гидропульсатор представляет собой сдвоенный поршневой насос, секции которого работают в противофазе. Секции соединены рабочими трубопроводами с соответствующими полостями рабочего. гидроцилиндра. В блоке управления рабочие трубопроводы могут соединяться между собой накоротко посредством дроссельного устройства, управляемого винтом со штурвалом. Это устройство позволяет осуществлять плавный запуск вибрационной машины, а также регулировать амплитуду колебаний путем неполного перекрытия канала и сброса части рабочей жидкости. В блоке управления расположено два предохранительных клапана подпиточного насоса.
Четырехпоршневой гидропульсаторный привод имеет корпус, в котором на подшипниках установлены эксцентриковый вал с подшипниками и четыре горизонтальных поршня.
Наиболее прогрессивными исполнительными органами являются гидроцилиндры с резиновыми поршнями-мембранами. Вибратор состоит из корпуса, к которому подведены напорный и сливной трубопроводы. С обоих концов корпуса установлены мембраны, представляющие собой упругие резинометаллические элементы. Гидроцилиндр смонтирован на кронштейне. При подаче рабочей жидкости обе мембраны выдвигаются из корпуса. Приведенная конструкция предназначена для уравновешенных конвейеров.
При значительной длине гидромагистрали в гидравлических возбудителях пульсационного типа ухудшается тепловой режим и происходят большие потери энергии вследствие затухания пульсаций в трубопроводах. Наиболее подходящими типами гидравлического поршневого привода для гидромагистралей значительной длины являются автоколебательные вибраторы. Этот тип привода питается от насоса постоянной производительности, который создает напор рабочей жидкости по всей длине гидромагистрали, что позволяет применять гидромагистрали значительной длины.
Гидравлический автоколебательный вибратор (рис. 83)
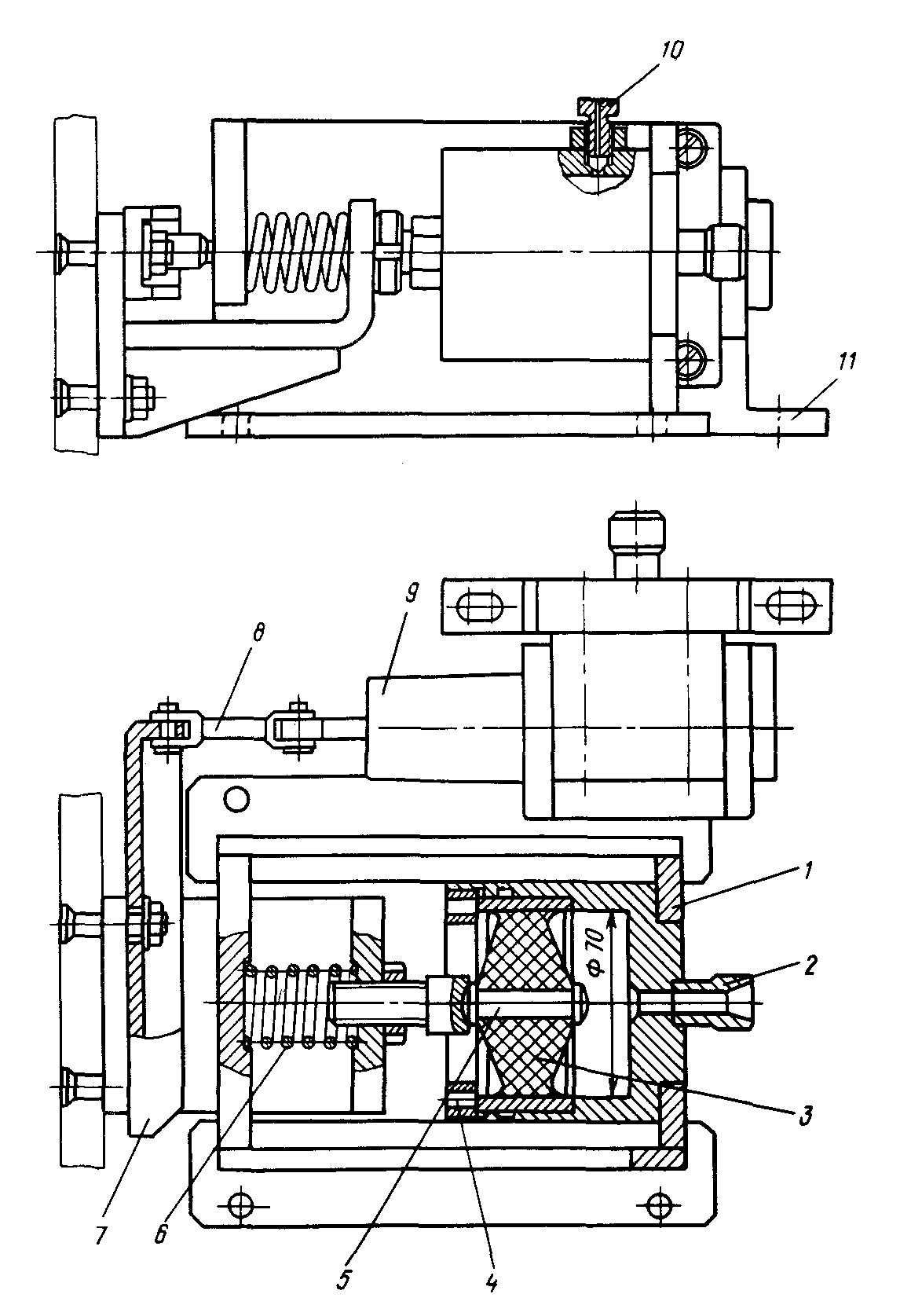
Рис. 83. Конструкция автоколебательного гидравлического вибратора с внешней обратной связью
Состоит из корпуса 1 со впускным патрубком 2, в котором установлена мембрана 3, выполненная в виде резинометаллического элемента. Мембрана быстросъемная и крепится в корпусе гайкой 4. К металлическому центру 5 мембраны с помощью пружины 6 крепится кронштейн 7, который шарнирной тягой 8 соединен с серийно выпускаемым золотником 9. Кронштейн 7 является рабочим шатуном и крепится к рабочему органу вибромашины, корпус вибратора устанавливается на раме с помощью кронштейна 11. Для выпуска воздуха из рабочей полости цилиндра при отладке установки служит клапан 10. Работает вибратор следующим образом. При исходном положении мембраны золотник соединяет рабочий цилиндр с напорной гидромагистралью, в рабочую полость поступает жидкость и мембрана деформируется, перемещая кронштейн влево. Совершается рабочий ход грузонесущего органа вибромашины. Одновременно кронштейн через тягу перемещает шток золотника, напорная магистраль перекрывается и рабочая полость цилиндра соединяется со сливной магистралью. Жидкость из рабочей полости цилиндра выдавливается в сливную магистраль под совместным действием мембраны, пружины и рабочей упругой системы вибромашины. Золотник возвращается в исходное положение, соединяя рабочий цилиндр с напорной магистралью. Цикл повторяется.
Пневматические вибраторы работают от стандартных промышленных пневмосистем с давлением 2–7 МПа. По принципу действия различают следующие типы поршневых пневматических вибраторов: пульса-торные, которые применяют при частотах до 15 Гц, значительных амплитудах-до 20–30 мм-и больших возмущающих силах; автоколебательные обычные на частоты 15–60 Гц при достаточно больших амплитудах и возмущающих силах; автоколебательные специальные на частоты до 2000 Гц при амплитуде до 0,2 мм.