11 Графоаналитический метод кинематического анализа - метод планов скоростей и ускорений.
Пусть дан кривошипно - ползунный механизм, схема которого показана на рис. 2.7. Известны длины звеньев, положение механизма и постоянная угловая скорость кривошипа W1. Требуется определить скорости и ускорения точек А, В, С, и угловые скорость и ускорение шатуна W2 и E2.
2.3.1
Построение планов скоростей. Определяем
скорость точки А кривошипа по формуле
![]() ,Здесь
,Здесь
![]() - длина кривошипа ОА
в М.
- длина кривошипа ОА
в М.
Назначаем
полюс плана скоростей РV
и из него перпендикулярно кривошипу
ОА откладываем отрезок PV
a
(рис2.8),
представляющий
собой вектор скорости точки А при
масштабном коэффициенте плана скоростей![]() .
который
определяется выражением
.
который
определяется выражением
![]() где
PV
a
-длина вектора в мм на плане скоростей.
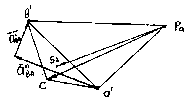
Для определения скорости точки В движение
шатуна разложим на переносное
поступательное со скоростью точки А и
относительное вращательное вокруг
этой точки.
Такое
разложение движения описывается
векторным уравнением.
где
PV
a
-длина вектора в мм на плане скоростей.
Для определения скорости точки В движение
шатуна разложим на переносное
поступательное со скоростью точки А и
относительное вращательное вокруг
этой точки.
Такое
разложение движения описывается
векторным уравнением.
![]()
В таблицу под уравнением внесены данные о величине и направлении векторов. Неизвестными здесь являются величины векторов.
VB
и VBA
при известных их направлениях.
Такое
уравнение может быть решено графически
построением плана скоростей. Из полюса
PV
проводится направление вектора
![]() ,
а
из конца вектора скорости точки А -
направление вектора
,
а
из конца вектора скорости точки А -
направление вектора
![]() .
На
пересечении этих прямых находится конец
вектора скорости точки В (точка "в"
плана скоростей). Теперь можно найти
скорость любой другой точки.
Например,
для скорости точки С можно записать два
векторных уравнения:
.
На
пересечении этих прямых находится конец
вектора скорости точки В (точка "в"
плана скоростей). Теперь можно найти
скорость любой другой точки.
Например,
для скорости точки С можно записать два
векторных уравнения:
![]() ,
,![]()
![]()
![]()
Проведя из точек а и в плана скоростей прямые, перпендикулярные отрезки АВ и ВС шатуна найдем конец вектора скорости точки С, начало его лежит в полюсе РV. Величины скоростей точек А, В, С в м/с определяются выражениями:
![]()
Т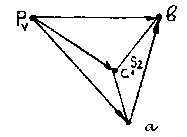
 аким
образом,
если
у звена известны величина и направление
скорости одной точки и направление
скорости
(траектория)
другой
точки,
то
можно определить скорость любой его
точки.
аким
образом,
если
у звена известны величина и направление
скорости одной точки и направление
скорости
(траектория)
другой
точки,
то
можно определить скорость любой его
точки.
12 Построение планов ускорений.
Определяем ускорение точки А кривошипа по формуле
![]() Здесь
Здесь
![]() ,
,![]() -
нормальное и тангенциальная составляющие.
В нашем примере
-
нормальное и тангенциальная составляющие.
В нашем примере
![]() ,
поэтому
,
поэтому
![]() Нормальное
ускорение определяется выражением
Нормальное
ускорение определяется выражением
![]() Этот
вектор направлен параллельно ОА к центру
вращения кривошипа
(от
точки А к точке 0 на звене).Назначаем
масштабный коэффициент плана ускорений
и определяем длину вектора Рaa
который
будет представлять ускорение точки А.
Этот
вектор направлен параллельно ОА к центру
вращения кривошипа
(от
точки А к точке 0 на звене).Назначаем
масштабный коэффициент плана ускорений
и определяем длину вектора Рaa
который
будет представлять ускорение точки А.![]()
Из
полюса плана ускорений Pa
откладываем отрезок
![]() рис. 2.9. Здесь стрелка внизу показывает
направление вектора от точки А к точке
0 на звене.Для определения ускорения
точки В опять разложим движение шатуна,
как
при построении плана скоростей. Тогда
будем иметь
рис. 2.9. Здесь стрелка внизу показывает
направление вектора от точки А к точке
0 на звене.Для определения ускорения
точки В опять разложим движение шатуна,
как
при построении плана скоростей. Тогда
будем иметь
![]() В
этом уравнении
В
этом уравнении
![]() и
и
![]() -нормальная и тангенциальная
составляющие относительного ускорения
-нормальная и тангенциальная
составляющие относительного ускорения
![]() .
Нормальная
составляющая вычисляется по формуле
.
Нормальная
составляющая вычисляется по формуле
![]() Здесь
ab
-
отрезок плана скоростей. Начало и конец
вектора
на плане ускорений обозначим точкамиа
и
n2
; n
-говорит, что отложено нормальное
ускорение, индекс 2 - что рассматривалось
звено 2. Полученное векторное уравнение
может быть решено графически построением
плана ускорений. Для этого из полюса Рa
проводим направление вектора абсолютного
ускорения точки В параллельно направляющим
ползуна b
и далее строим векторную сумму по
правой части уравнения.
Пересечение
известных по направлению векторов
Здесь
ab
-
отрезок плана скоростей. Начало и конец
вектора
на плане ускорений обозначим точкамиа
и
n2
; n
-говорит, что отложено нормальное
ускорение, индекс 2 - что рассматривалось
звено 2. Полученное векторное уравнение
может быть решено графически построением
плана ускорений. Для этого из полюса Рa
проводим направление вектора абсолютного
ускорения точки В параллельно направляющим
ползуна b
и далее строим векторную сумму по
правой части уравнения.
Пересечение
известных по направлению векторов
![]() и
и
![]() ,и
дает решение - точку "в" плана
ускорений. Отрезок n2b
в принятом масштабе представляет вектор
,и
дает решение - точку "в" плана
ускорений. Отрезок n2b
в принятом масштабе представляет вектор
![]() ,
величина
которого равна
,
величина
которого равна
![]() Зная величину и направление тангенциальной
составляющей относительного ускорения
точек В и А,
можно
определить величину и направление
углового ускорения шатуна
Зная величину и направление тангенциальной
составляющей относительного ускорения
точек В и А,
можно
определить величину и направление
углового ускорения шатуна
![]() .
Его величина определяется выражением
.
Его величина определяется выражением
![]() Для
определения направления
-
вектор
показываем выходящим из точки В на
звене.
Для
определения направления
-
вектор
показываем выходящим из точки В на
звене.