

4.4. Процесс регулирования вследствие уменьшения нагрузки дизеля
При уменьшении нагрузки снижается крутящий момент, требуемый от дизеля, а тем самым уменьшается и эффективное значение степени наполнения.
Если рассогласование равно нулю, т.е. если эффективный шаг равен заданному, то процесс регулировки не включается. В этом случае дизель работает в режиме частичной нагрузки.
Если же имеется отклонение регулируемой величины, то посредством разностного напряжения UFдифф через серводвигатель Мf4 уменьшается корректирующее напряжение Uкорр, а шаг увеличивается так, чтобы эффективное значение степени наполнения дизеля соответствовало заданному, или чтобы произошла уставка нового значения отклонения регулируемой величины.
4.5. Процесс регулирования вследствие изменения заданного шага гребного винта
посредством шагового датчика
Если заданный шаг гребного винта изменяется рычагом обслуживания в шаговом датчике, то изменение нагрузки дизеля, так же как и изменения, описанные в разделах 2, 3 и 4 вызывают соответствующее срабатывание процесса регулирования у регулятора предельной мощности.
2 Схема цепей управления электропривода подруливающего устройства с врш
Применяется с целью улучшения маневренных качеств судов, особенно в режимах
швартовки, прохода узкими фарватерами, в каналах и портах. На судне устанавливается
обычно одно – два подруливающих устройства в носовой части в туннеле. Корпус
устройства крепится к туннелю и поддерживается кронштейнами. Вращение винта
осуществляется двумя электродвигателями через редуктор, вертикальный вал и
коническую зубчатую передачу первый рисунок
Электрогидравлический преобразователь ЭГП направляет под давлением масло
через распределительный золотник РЗ в левую или правую полость цилиндра сервомотора
2, передвигая тем самым поршень и шток 3. На конце штока укреплен редуктор 5, который
через систему передач поворачивает лопасти винта. Система обратной связи, отражающая
движение поршня сервомотора, образуется системой рычагов 1, передающей возвратно –
поступательное движение штока сервомотора линейному преобразователю шага ЛПШ. К
рычагу 1 прикреплена тяга датчика нулевого шага ДНШ, который представляет собой
конечный выключатель, замкнутый при нулевом шаге лопастей винта.
Необходимый шаг винта устанавливается с помощью рукоятки, а истинное
значение шага высвечивается на посту управления ПУ светодиодами в положениях 0; 25;
50; 75 и 100% шага винта в каждом направлении. Управление с мостика возможно только
после полной подготовки устройства к работе.
Для этого на любом ПУ необходимо нажать кнопку принятия управления. При этом
засветится светодиод. С поста ПУ0 из ЦПУ можно управлять шагом винта только при
выключенных двигателях.
Переключение постов управления осуществляется с помощью переключателя ПП,
выходное напряжение которого пропорционально заданному значению шага винта. Выход
ПП соединяется с входом регулятора шага РШ. РШ является электронным
пропорциональным регулятором непрерывного действия, усиленный выход которого
управляет электрогидравлическим преобразователем. ЭГП преобразовывает непрерывный
электрический сигнал на пропорциональное перемещение распределительного золотника
РЗ, управляющего гидравлическим сервомотором 2. Сервомотор 2 через шток 3 изменяет
шаг винта и истинное значение шага передается через рычаг 1 в линейный преобразователь
шага ЛПШ, который преобразует линейные перемещения в пропорциональный или
электрический сигнал, передаваемый для сравнения в регулятор шага РШ.
Питание на ПП и РШ подается со щита. При подготовке к работе устройства
запускают электродвигатели
 Вначале
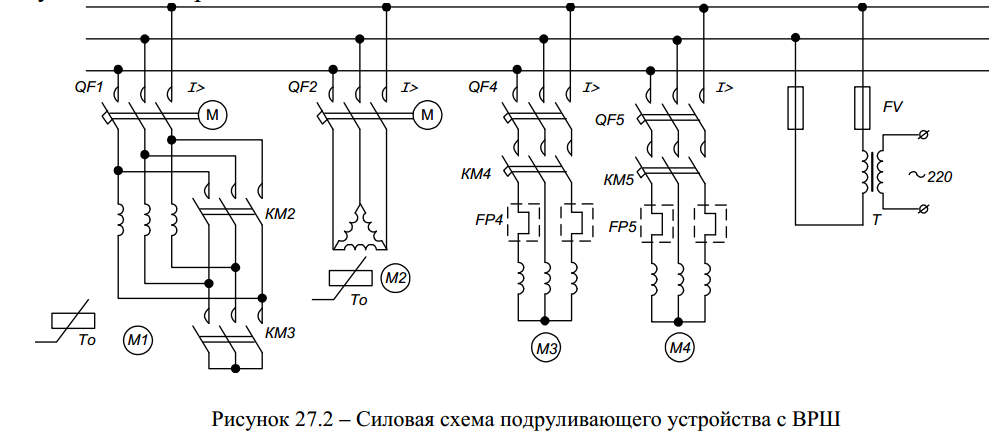
пускаются насосы смазочного масла М4 и
гидропривода М3 (рис.27.2),
Вначале
пускаются насосы смазочного масла М4 и
гидропривода М3 (рис.27.2),
затем приводной двигатель М1 с переключением со звезды на треугольник, а затем М2
(М 1 и М2 по 450 кВт).
Схема цепей управления второй и третий рисунок
Пуск насосов производится нажатием кнопок 4SB3 (цепь 25) и 5SB3 на
распределительном щите (цепь 31) или 4SB4 и 5SB4 в ЦПУ. При этом срабатывают
линейные контакторы насосов КМ4 и КМ5, подключая М3 и М4 к сети.
Реле 4К1 (28), 5К1 (35), 4КЗ(30) и 5К3 (37) работают на сигналы. 4К1 и 5К1
сигнализируют о низком уровне масла в цистернах, что контролируется контактами уровня
SL4(28) и SL5(35). 4К3 и 5К3 срабатывают при значительном снижении давления масла.
При снижении давления масла в гидросистеме замыкается SР4(30) и в системе смазки –
SР5(37). Реле времени КТ4 (29) и КТ5 (36) поставлены для исключения ложных
срабатываний защиты, т.к. насосам надо время для поднятия давления.
Отключение насосов производится кнопками «Стоп» соответственно в РЩ и ЦПУ - 4SB1 (25), 5SB1 (31), 4SB2 (25) и 5SB2 (31). Защита М3 и М4 производится FP4 и FP5 и QF4 и QF5.
осуществляет SР3(23). При нормальном давлении SP3 замыкает цепь реле 3К2(24), которое срабатывая позволяет включить реле 1К1(1), а следовательно и М1. При исчезновении давления сработает 3К1 (24) и своими контактами в цепи 14 и 22 отключает питание катушек минимального напряжения QF1 и QF2, отключая М1 и М2. Пуск М1 и М2 осуществляется раздельно, сначала М1
переключением со звезды на треугольник, а затем М2. При нажатии кнопки «Пуск» 1SB3 (1
) или в ЦПУ 1SB4 (1) получат питание 1К1(1), если лопасти винта имеют шаг нулевого
упора (SQ замкнут), пущен насос смазочного масла (замкнут КТ5(36)) и имеется
нормальное давление в гидросистеме (замкнут 3К2(1)). Если электростанция имеет запас
мощности (замкнут SL1(4)) 1К2 (4) получит питание. SL можно блокировать вручную SB5
(4). При срабатывании 1К1 и 1К2 запитывается КМ3 (6) и привод QF1(10). М1 подключится
к сети звездой. По истечение выдержки времени КТ1 отключится КМ3(6) и включится
КМ2(8), переключив М1 на треугольник. Сработает 1К4 (12) и 1К5 (13), катушка
минимального напряжения (14) получит питание и будет удерживать QF1 включенным.
Пуск М2 происходит автоматически после М1. Так как 1К4 и КМ2 включены, то
запитывается КТ2 (15), которое с выдержкой времени запитает 2К2 (16). Через 2 с запитает
привод М. QF2 (18) и он подключит М2. 2К7 (20) сигнализирует готовность к работе и
можно приступить к управлению с ПУ1 – ПУ3, а ПУ0 из работы выводится. Если
вентилятор помещения не работает – срабатывает К1 (38) и включает сигнализацию. Пуск
его в РУ кнопками SB3 и в ЦПУ - SB4, а остановка кнопками «стоп» SB1 и SB2 (39, 40).
Двигатель вентилятора включится контактором К2 (39). Реле К3, К4, К5 и К6
сигнализируют о его работе. Контакт SТ (43) срабатывает от температуры помещения, а SV
(45) контролирует поток воздуха вентилятора.