

25 Электропривод систем кренования
Кренование осуществляется попеременным перекачиванием жидкости насосом из
цистерн одного борта в цистерны другого борта.
Диффентование – перекачкой из носовых цистерн в кормовые и наоборот.
Кренование и диффентование предназначено для борьбы с заклиниванием корпуса
во льдах.
Ручное местное управление осуществляется с помощью потенциометрического
реостата RP (рис. 25.1), который изменяет значение и направление тока в обмотке
независимого возбуждения L1G2 возбудителя генератора G2. Если движок реостата RP
стоит в нулевом положении, то блокировочный контакт SQ0 замкнут и при включении
выключателя S1 цепей управления срабатывает контактор возбуждения КМ, подключая
возбуждение исполнительного двигателя М1 и подавая питание на реостат RP. Дальнейшее управление электроприводом – пуск, остановка, реверс и регулирование угловой
скорости М1 производится посредством потенциометрического реостата. Предусмотрено также
дистанционное и автоматическое управление. Для чего выключателем S2 подается питание на цепи управления, а переключателем S3 выбирается режим работы: «Д» или «А». При дистанционном управлении переключатель ставится на «Д». Создание крена на левый борт делается нажатием
на
SB1. При этом получает питание реле времени
КТ1, замыкающее с выдержкой времени
контакты в цепи обмотки L1М2 серводвигателя
М2. Серводвигатель перемещает движок
реостата в сторону, соответствующую
перекачке балласта в цистерну левого
борта. По достижении движком крайнего
п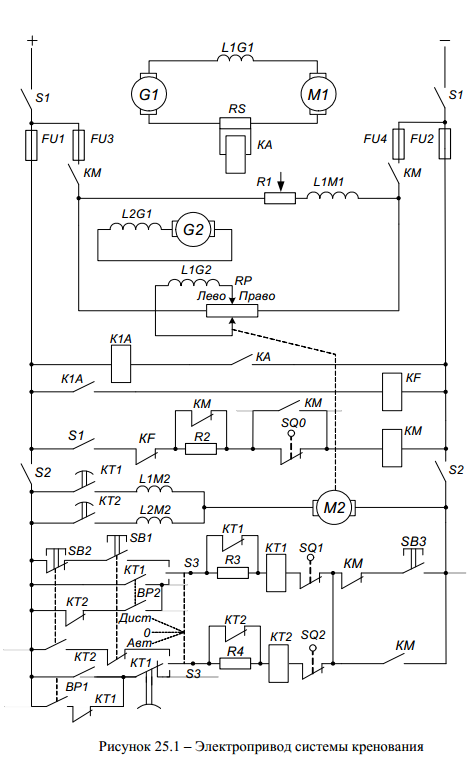 оложения
размыкаются контакты реостата SQ1, и
реле отключает серводвигатель.
Электропривод насоса продолжает работать
до тех пор,
оложения
размыкаются контакты реостата SQ1, и
реле отключает серводвигатель.
Электропривод насоса продолжает работать
до тех пор,
пока нажата кнопка. Перекачка балласта в цистерну правого борта происходит при нажатии
кнопки SB2.
При этом включается реле времени КТ2, реверсируется серводвигатель и движок
реостата перемещается в противоположную сторону. Манипулируя обеими кнопками,
можно перекачивать балласт с нужной скоростью и в требуемых количествах.
Для автоматического режима сначала наполняется одна из цистерн, например правая, а
затем переключатель S3 устанавливается в положение «А». Контакты ВР2 оказываются
балласта в цистерну левого борта.
Контакты ВР2 шунтируются контактами КТ1. При размыкании контактов SQ1 и
отключении реле КТ1 насос продолжает перекачивать балласт в цистерну Л.Б. с
максимальной подачей. При наполнении этой цистерны до необходимого уровня
срабатывает реле давления ВР1, которое включает КТ2. Серводвигатель передвигает
движок реостата вправо, Двигатель М1 реверсируется и насос будет перекачивать балласт в
цистерну П.Б. Затем цикл работы повторяется автоматически. Изменением уставки реле
времени задается необходимая степень наполнения цистерн после создания в них давления,
соответствующего уставкам реле давления. SB3 используется при наладочных работах, при
отключении КМ.
Максимальная защита - реле КА, включенное параллельно шунту RS, и
срабатывающее при токе выше уставки, замыкает контакты в цепи реле К1А, которое
срабатывая, подает питание на KF, которое отключит КМ и снимает возбуждение со всех
электрических машин.