

Лаб5_ПЗА
.docxМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
ХАРЬКОВСКИЙ НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ РАДИОЭЛЕКТРОНИКИ
Кафедра СТ
Отчет по лабораторной работе № 5 По дисциплине: Периферийные устройства автоматики
Выполнили: Проверил:
Ст. гр. АКТСИу-17-1 доцент каф. СТ
Черкашин В.А. Ребезюк Л.Н.
Юрченко В.Р.
Харьков 2019
5 ПРИНЦИПЫ И ЗАКОНЫ РЕГУЛИРОВАНИЯ
5.1 Цель работы
Ознакомление с принципами разомкнутого и замкнутого регулирования. Исследование процессов преобразования сигналов в каналах типового ПИД-регулятора. Изучение свойств непрерывных законов регулирования: пропорционального (П), интегрального (И), изодромного (ПИ) и вариантов с дифференцирующим каналом (ПД, ПИД).
5.2 Ход лабораторной работы
Исходя из 3 варианта лабораторной работы входные данные имеют вид:
|
K0 |
T |
|
1,1 |
0,016 |
5.3 Составить передаточную функцию всех блоков
Расчет W0:










5.4 Вычисление модели трапециоида

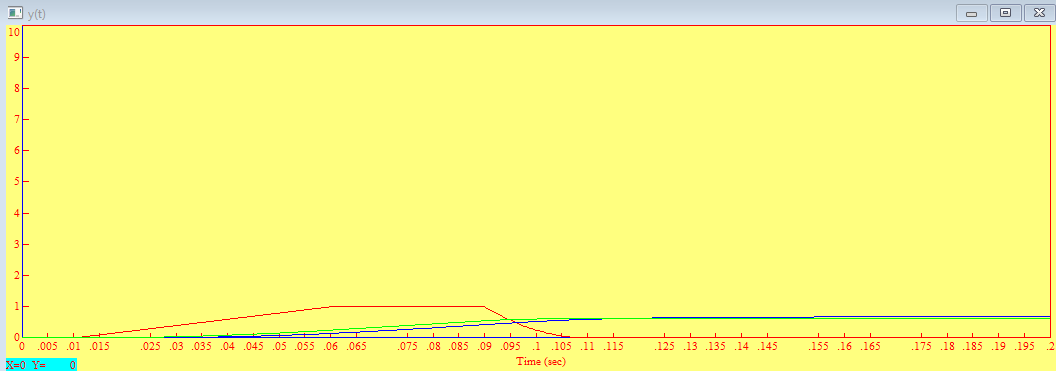
5.5 Изучение формирования u(t) для принципа по задающему воздействию

Рисунок 5.1 – Модель с Kp=2, KI=0, KD=0
 Рисунок
5.2 – Модель с Kp=0,
KI=10,
KD=0
Рисунок
5.2 – Модель с Kp=0,
KI=10,
KD=0

Рисунок 5.3 – Модель с Kp=0, KI=0, KD=0.08
Исходя из рисунков 5.1-5.3 видно, что kp увеличивает сигнал пропорционально. Интегральная составляющая KI постепенно накапливает значения а после окончания действия входного воздействия продолжает выдавать сигнал накопленный на предыдущем этапе это исходит из теоремы запаздывания в преобразованиях Лапласа. Дифференциальная составляющая соответственно берет производную от текущего сигнала, и когда доходит до части трапециоида где сигнал равен 1(t) видно, что среда моделирования не может вычислить производную и моделирование завершается.
5.6 Изучение формирования u(t) для принципа по отклонению

Рисунок 5.4– Модель с Kp=10, KI=0, KD=0
 Рисунок
5.5 – Модель с Kp=0,
KI=500,
KD=0.00
Рисунок
5.5 – Модель с Kp=0,
KI=500,
KD=0.00
 Рисунок
5.6 – Модель с Kp=0,
KI=0,
KD=0.05
Рисунок
5.6 – Модель с Kp=0,
KI=0,
KD=0.05
Из рисунков 5.4-5.6 видно, что пропорциональный канал увеличивает сигнал ошибки (в принципе по отклонению) в k раз. Что увеличивает точность системы, однако при больших k система может выйти из устойчивого состояния и перейти в автоколебательный режим. Интегральный канал накапливает сигнал ошибки и плавно подводит значение выходного сигнала под задающие. Дифференциальный канал влияет на скорость изменения выходного сигнала, чем больше скорость изменения, тем большее воздействие воздействует на наш ОУ.
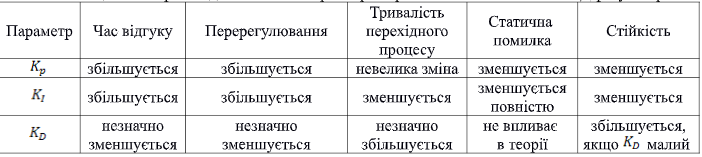
5.7 Изучение влияния каналов ПИД на качество при принципе по отклонению.
5.8 Исследование моделей на стойкость

Рисунок 5.7 – Модель с Kp=850, KI=0, KD=0.00 выход из состояния устойчивости
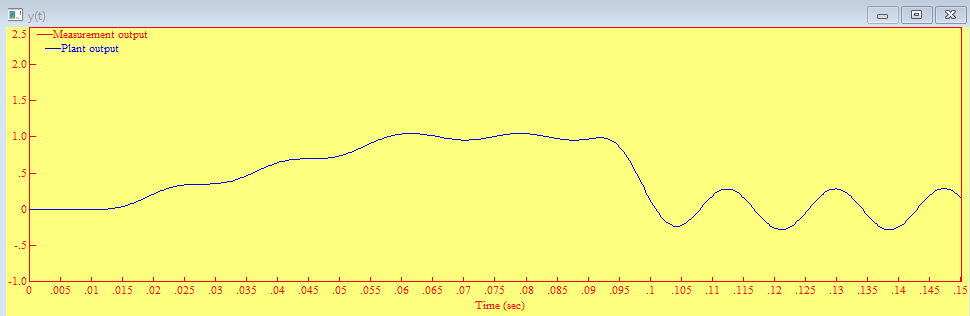
Рисунок 5.8 – Модель с Kp=1, KI=2000, KD=0.00 выход из состояния устойчивости
С помощью Кd невозможно вывести систему в автоколебательный режим. Неустойчивое состояние.
Для системы с принципом управления по задающему воздействию невозможно вывести систему в автоколебательный режим. Так как ПИД регулятор влияет только на формирование задающего сигнала.
5.9 Настройка ПИД с помощью инверторной ПФ ОУ
 =
=

 0
0


Рисунок 5.9 – Модель с принципом по задающему воздействию и настроенным ПИД регулятором
5.9 Оптимальная настройка ПИД с помощью выведения САУ из устойчивого сосояния

Рисунок 5.10 – Модель выведенная на границу устойчивости

Рисунок 5.11 – Модель с принципом по отклонению и настроенным ПИД регулятором

 237073
237073



Рисунок 5.11 – Результат вывода по заданным R и С
ВЫВОДЫ
В ходе лабораторной работы были изучены принципы разомкнутого и замкнутого регулирования, свойства непрерывных законов регулирования: пропорционального (П), интегрального (И), изодромного (ПИ) и вариантов с дифференцирующим каналом (ПД, ПИД), а также были исследованы процессы преобразования сигналов в каналах типового ПИД-регулятора.
В ходе лабораторной работы, было установлено как влияют коэффициенты П, И, Д на характеристику в разомкнутой и замкнутой моделях.
Так же было рассчитано значение номиналов резисторов(R0,R1) и конденсаторов(С0,С1).